
Existence and Uniqueness Result for Fuzzy Fractional Order Goursat Partial Differential Equations
 , ,
, , 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries
- is upper semi-continuous;
- is convex, i.e., ,
- is normal, i.e., ;
- Closure of set is compact.
- is integrable in interval
- The H-difference exist for sufficiently small and the folloing limits exist in
- The H-difference exist for sufficiently small and the following limits exist in
- If exist on then
- If exist on then
- If exist on then
- If exist on then
- if where
- if where
- If u is differentiable then
- If u is differentiable then
- If u is differentiable, then the equivalent integral form is
- If u is differentiable, then the equivalent integral form is
3. Existence and Uniqueness Results of Fractional Order Fuzzy Goursat Problem
- 1:
- For , the following system of equations is obtained
- 2:
- For and , the following system of equations is obtained
- 3:
- For and , the following system of equations is obtained
- 4:
- For , the following system of equations is obtained
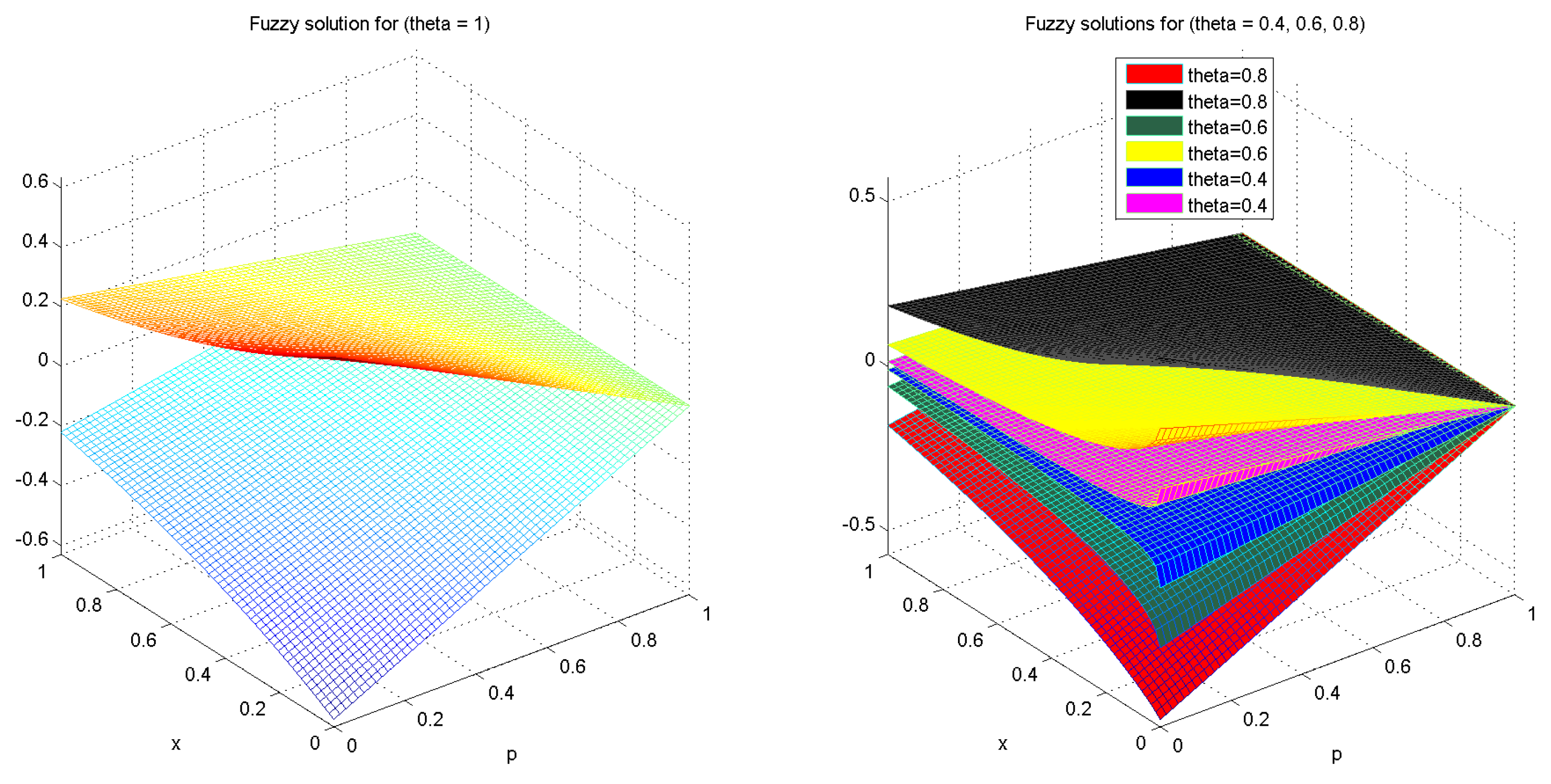
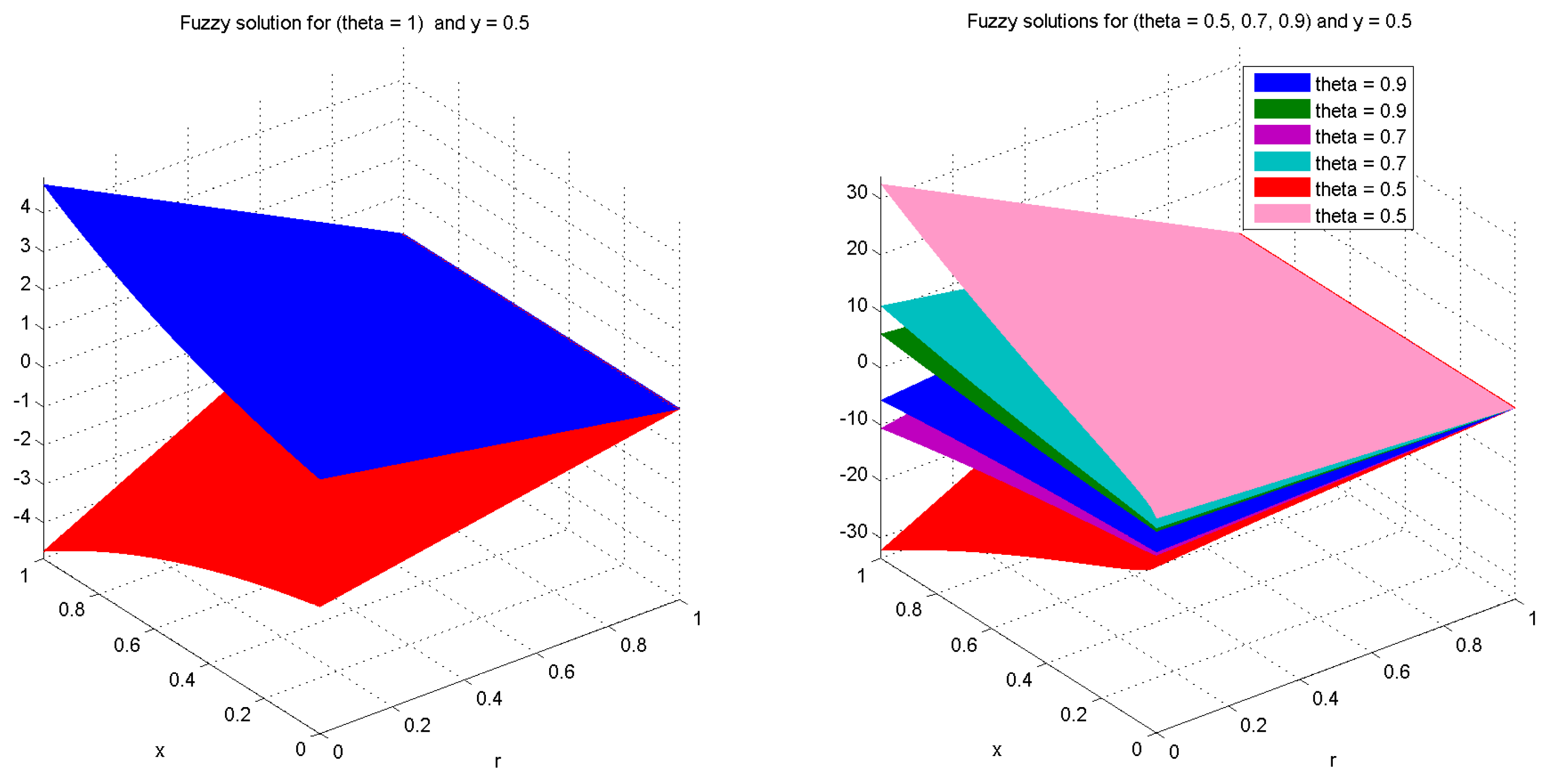
4. Some Numerical Examples
5. Applications of Fractional Fuzzy Goursat Problems
6. Conclusions and Future Direction
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zadeh, L.A. Fuzzy sets. Inf. Control 1965, 8, 338–353. [Google Scholar] [CrossRef]
- Sori, A.A.; Ebrahimnejad, A.; Motameni, H. Elite artificial bees’ colony algorithm to solve robot’s fuzzy constrained routing problem. Comput. Intell. 2019, 36, 659–681. [Google Scholar] [CrossRef]
- Nasseri, S.H.; Ebrahimnejad, A.; Gholami, O. Fuzzy Stochastic Data Envelopment Analysis with Undesirable Outputs and its Application to Banking Industry. Int. J. Fuzzy Syst. 2017, 20, 534–548. [Google Scholar] [CrossRef]
- Xi, Y.; Ding, Y.; Cheng, Y.; Zhao, J.; Zhou, M.; Qin, S. Evaluation of the Medical Resource Allocation: Evidence from China. Healthcare 2023, 11, 829. [Google Scholar] [CrossRef]
- Jan, N.; Gwak, J.; Pamucar, D. A Robust Hybrid Decision Making Model for Human-Computer Interaction in the Environment of Bipolar Complex Picture Fuzzy Soft Sets. Inf. Sci. 2023, 645, 119163. [Google Scholar] [CrossRef]
- Jamal, N.; Sarwar, M.; Hussain, S. Existence criteria for the unique solution of first order linear fuzzy differential equations on the space of linearly correlated fuzzy numbers. Fractals 2022, 8, 2240221. [Google Scholar] [CrossRef]
- Jamal, N.; Sarwar, M.; Mlaiki, N.; Aloqaily, A. Solution of linear correlated fuzzy differential equations in the linear correlated fuzzy spaces. AIMS Math. 2023, 9, 2695–2721. [Google Scholar] [CrossRef]
- Buckley, J.J.; Feuring, T. Introduction to fuzzy partial differential equations. Fuzzy Sets Syst. 1999, 105, 241–248. [Google Scholar] [CrossRef]
- Allahviranloo, T.; Gouyandeh, Z.; Armand, A.; Hasanoglu, A. On fuzzy solutions for heat equation based on generalized Hukuhara differentiability. Fuzzy Sets Syst. 2015, 265, 1–23. [Google Scholar] [CrossRef]
- Zureigat, H.; Tashtoush, M.A.; Jassar, A.F.A.; Az-Zo’bi, E.A.; Alomari, M.W. A Solution of the Complex Fuzzy Heat Equation in Terms of Complex Dirichlet Conditions Using a Modified Crank–Nicolson Method. Adv. Math. Phy. 2023, 2023, 6505227. [Google Scholar] [CrossRef]
- Datta, D. An algorithm for solving fuzzy advection diffusion equation and its application to transport of radon from soil into buildings. Int. J. Syst. Assur. Eng. Manag. 2014, 8, 2129–2136. [Google Scholar]
- Jamal, N.; Sarwar, M.; Agarwal, P.; Mlaiki, N.; Aloqaily, A. Solutions of fuzzy advection-diffusion and heat equations by natural adomian decomposition method. Sci. Rep. 2023, 13, 18565. [Google Scholar] [CrossRef] [PubMed]
- Khastana, A.; Rodriguez-Lopezb, R. An existence and uniqueness result for fuzzy Goursat partial differential equation. Fuzzy Sets Syst. 2019, 375, 141–160. [Google Scholar] [CrossRef]
- Salahshour, S.; Allahviranloo, T.; Abbasbandy, S.; Baleanu, D. Existence and uniqueness results for fractional differential equations with uncertainty. Adv. Diff. Eq. 2012, 2012, 112. [Google Scholar] [CrossRef]
- Hoa, N.V. Fuzzy fractional functional differential equations under Caputo gH-differentiability. Commun. Nonlinear Sci. Numer. Simul. 2015, 22, 1134–1157. [Google Scholar] [CrossRef]
- Shah, K.; Seadawy, A.R.; Arfan, M. Evaluation of one dimensional fuzzy fractional partial differential equations. Alex. Eng. J. 2020, 59, 3347–3353. [Google Scholar] [CrossRef]
- Kumar, S.; Nisar, K.S.; Kumar, R.; Cattani, C.; Samet, B. A new Rabotnov fractional exponential function based fractional derivative for diffusion equation under external force. Mathe. Methods. Appl. Sci. 2020, 43, 4460–4471. [Google Scholar] [CrossRef]
- Arfan, M.; Shah, K.; Ullah, A.; Abdeljawad, T. Study of fuzzy fractional order diffusion problem under the Mittag-Leffler Kernel Law. Phys. Scr. 2021, 96, 074002. [Google Scholar] [CrossRef]
- Ahmad, N.; Ullah, A.; Ullah, A.; Ahmad, S.; Shah, K.; Ahmad, I. On analysis of the fuzzy fractional order Volterra-Fredholm integro-differential equation. Alex. Eng. J. 2021, 60, 1827–1838. [Google Scholar] [CrossRef]
- Khan, H.; Gomez-Aguilar, J.F.; Abdeljawad, T.; Khan, A. Existence results and stability criteria for ABC-fuzzy-Volterra integro-differential equation. Fractals 2020, 28, 2040048. [Google Scholar] [CrossRef]
- Khan, W.A.; Zarin, R.; Zeb, A.; Khan, Y.; Khan, A. Navigating Food Allergy Dynamics via a Novel Fractional Mathematical Model for Antacid-Induced Allergies. J. Math. Tech. Model. 2024, 1, 25–51. [Google Scholar]
- Khan, F.M.; Khan, Z.U. Numerical Analysis of Fractional Order Drinking Mathematical Model. J. Math. Tech. Model. 2024, 1, 11–24. [Google Scholar]
- Courant, R.; Hilbert, D. Methods of Mathematical Physics; Wiley: New York, NY, USA, 1989. [Google Scholar]
- Wazwaz, A.M. The variational iteration method for a reliable treatment of the linear and the nonlinear Goursat problem. Appl. Math. Comput. 2007, 193, 455–462. [Google Scholar] [CrossRef]
- Ahmad, J.; Mushtaq, M. Exact Solution of Linear and Non-linear Goursat Problems. J. Comput. Math. 2015, 3, 14–17. [Google Scholar] [CrossRef]
- Iftikhar, A.; Arif, W.; Zaman, L.; Naseem, T. Novel Techniques for Solving Goursat Partial Differential Equations in the Linear and Nonlinear Regime. IJEMD-M 2022, 1, 17–37. [Google Scholar]
- Bede, B. Mathematics of Fuzzy Sets and Fuzzy Logic; Springer: London, UK, 2013. [Google Scholar]
- Diamond, P.; Kloeden, P. Metric Spaces of Fuzzy Sets; World Scientific: Singapore, 1994. [Google Scholar]
- Bede, B.; Gal, S.G. Generalization of the differentiability of fuzzy-number-valued functions with applications to fuzzy differential equation. Fuzzy Sets Syts. 2005, 151, 581–599. [Google Scholar] [CrossRef]
- Bahrami, F.; Alikhani, R.; Khastan, A. Transport equation with fuzzy data. Iran. J. Fuzzy Syst. 2018, 15, 67–78. [Google Scholar]
- Erdélyied, A. Higher Transcendental Functions; McGraw-Hill: New York, NY, USA, 1955; Volume 1. [Google Scholar]
- Rahman, N.A.A.; Ahmad, M.Z. Solving fuzzy fractional differential equations using fuzzy Sumudu transform. J. Nonlinear Sci. Appl. 2017, 10, 2620–2632. [Google Scholar] [CrossRef]
- Özkan, O.; Kurt, A. Exact Solution of Fractional Partial Differential Equation Systems with Conformable Derivative. Filomat 2019, 33, 1313–1322. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sarwar, M.; Jamal, N.; Abodayeh, K.; Promsakon, C.; Sitthiwirattham, T. Existence and Uniqueness Result for Fuzzy Fractional Order Goursat Partial Differential Equations. Fractal Fract. 2024, 8, 250. https://0-doi-org.brum.beds.ac.uk/10.3390/fractalfract8050250
Sarwar M, Jamal N, Abodayeh K, Promsakon C, Sitthiwirattham T. Existence and Uniqueness Result for Fuzzy Fractional Order Goursat Partial Differential Equations. Fractal and Fractional. 2024; 8(5):250. https://0-doi-org.brum.beds.ac.uk/10.3390/fractalfract8050250
Chicago/Turabian StyleSarwar, Muhammad, Noor Jamal, Kamaleldin Abodayeh, Chanon Promsakon, and Thanin Sitthiwirattham. 2024. "Existence and Uniqueness Result for Fuzzy Fractional Order Goursat Partial Differential Equations" Fractal and Fractional 8, no. 5: 250. https://0-doi-org.brum.beds.ac.uk/10.3390/fractalfract8050250