
Fixed-Time Trajectory Tracking Control of Fully Actuated Unmanned Surface Vessels with Error Constraints

Abstract
:1. Introduction
- (1)
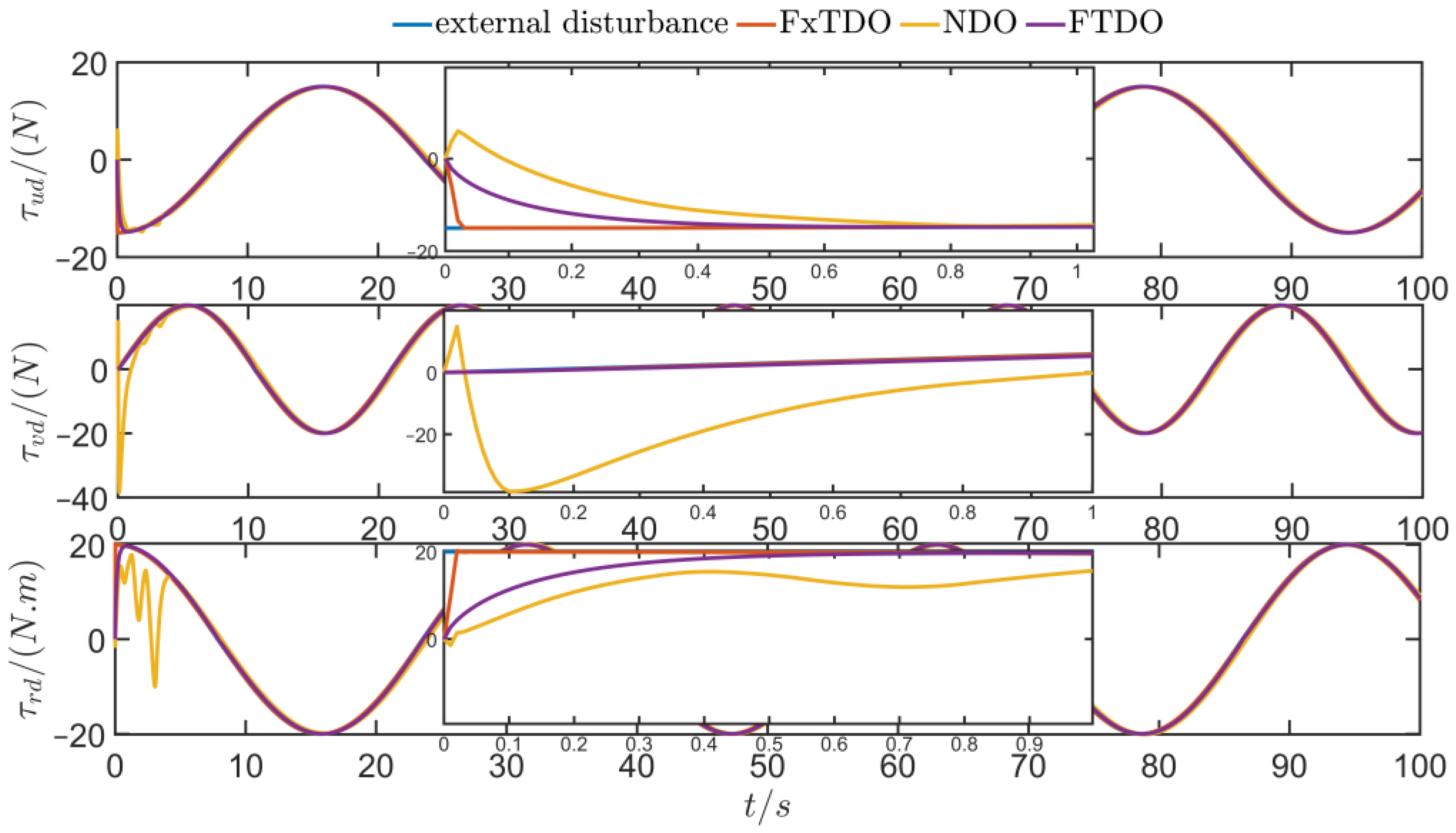
- A fixed-time disturbance observer is designed to quickly estimate and compensate for the external time-varying disturbance to improve the controller’s robustness. Different from the existing nonlinear disturbance observer [24] and finite-time disturbance observer [25], the proposed fixed-time observer has faster convergence speed and higher accuracy. Moreover, its convergence time is independent of the initial states.
- (2)
- (3)
- Combining backstepping control, command filter, and fixed-time control theory, a fixed-time prescribed performance control law is designed to make the trajectory tracking error converge in a fixed time. Unlike the finite-time control [20], the convergence time of the proposed fixed-time control scheme is independent of the system’s initial states.
2. Problem Description and Preliminary Knowledge
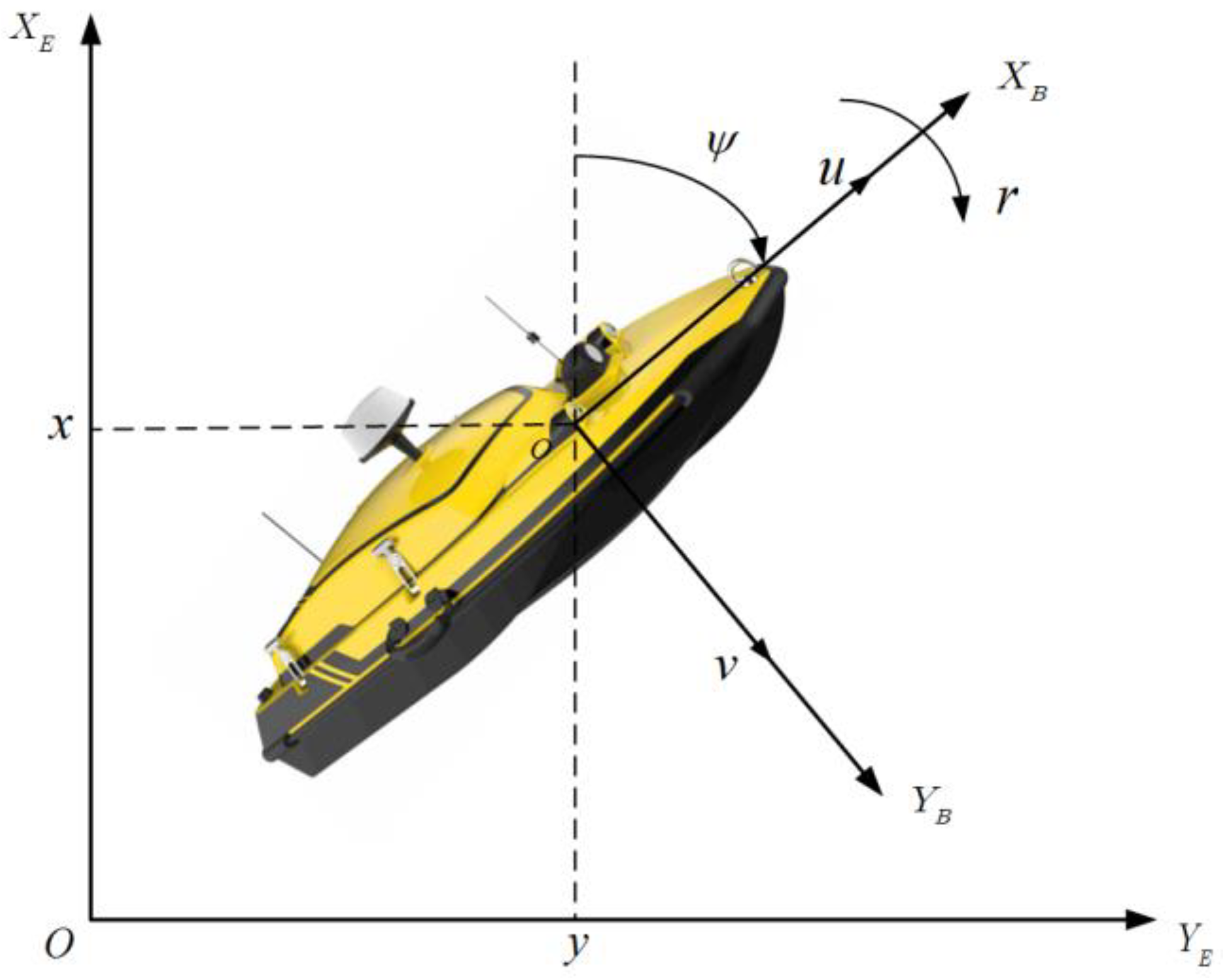
2.1. USV Dynamic Model
2.2. Related Lemmas
3. Main Results
3.1. Fixed-Time Disturbance Observer Design
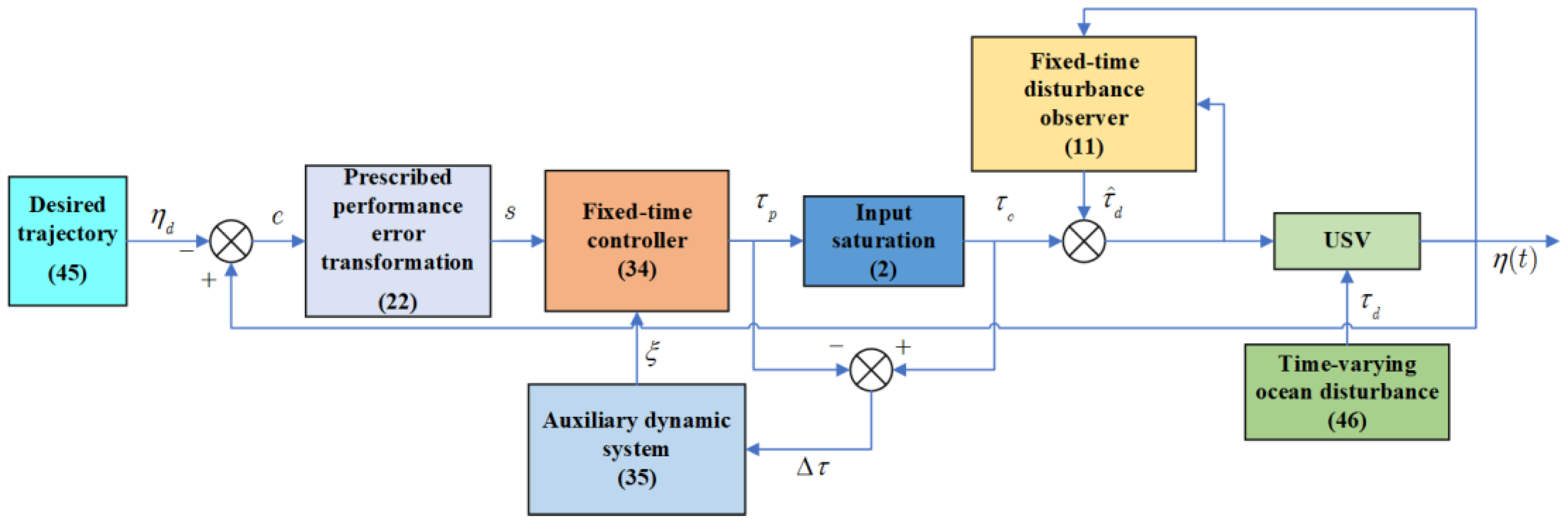
3.2. Fixed-Time Prescribed Performance Controller Design
4. Simulation Results
4.1. Simulation Conditions
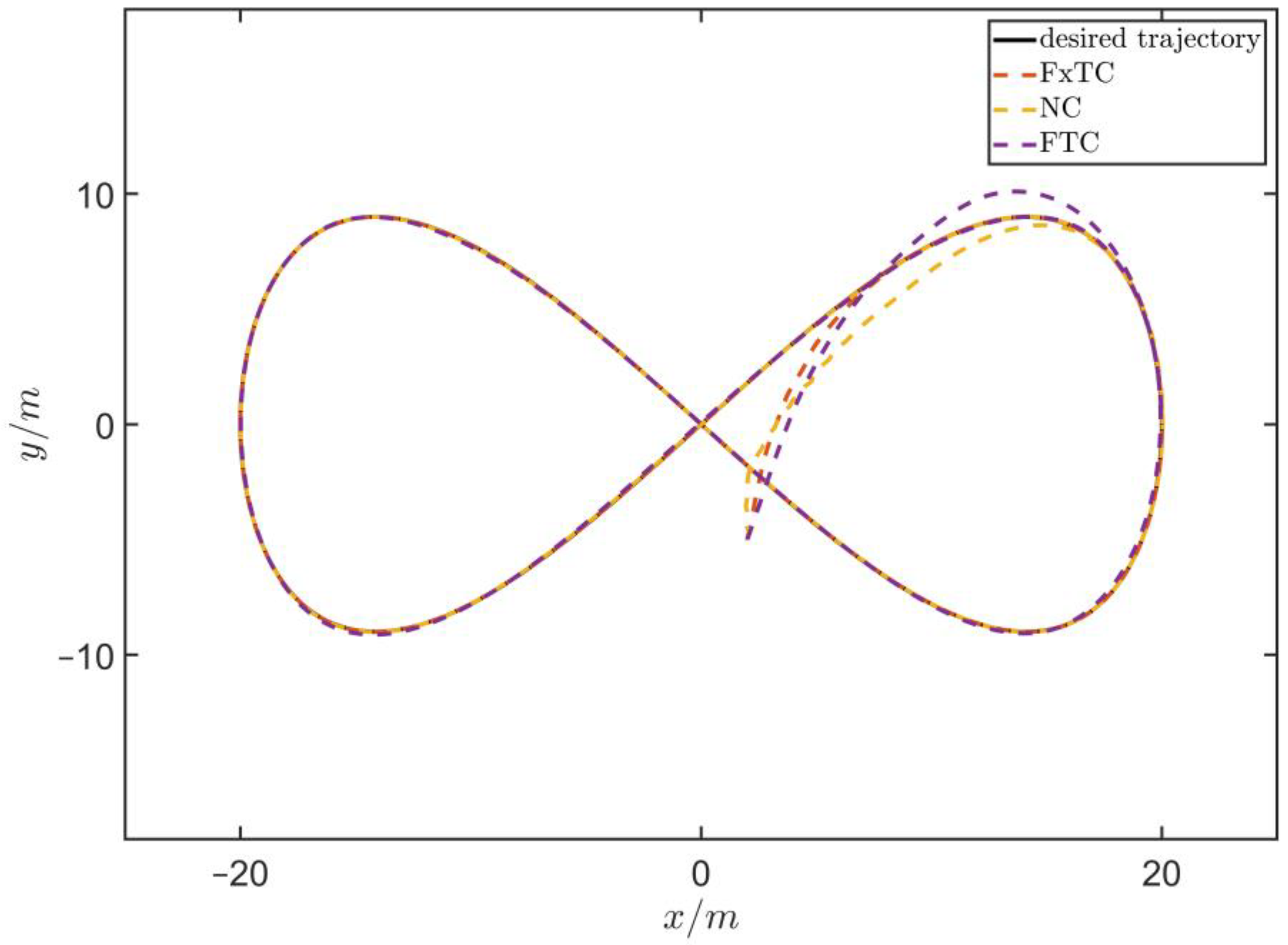
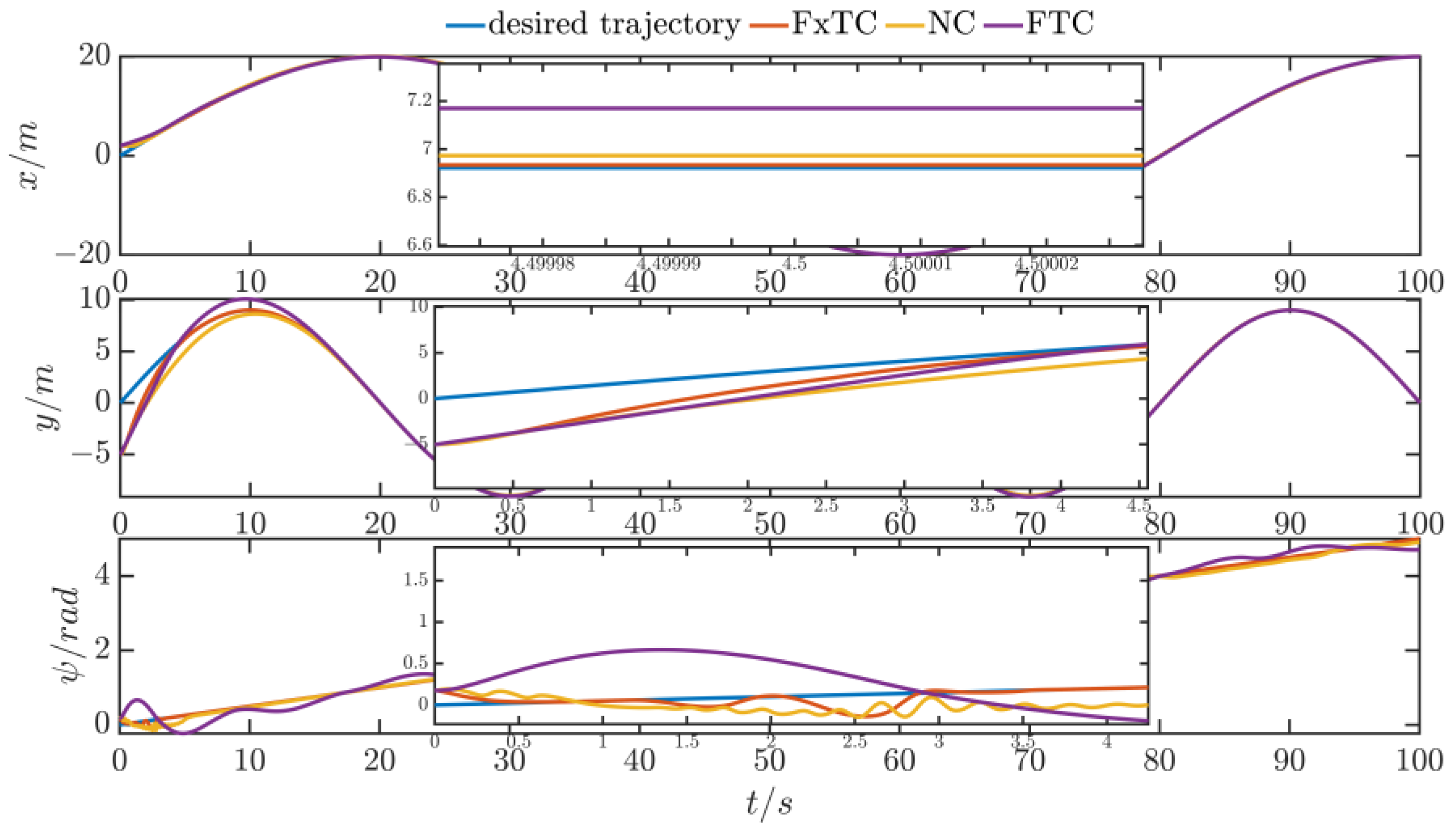
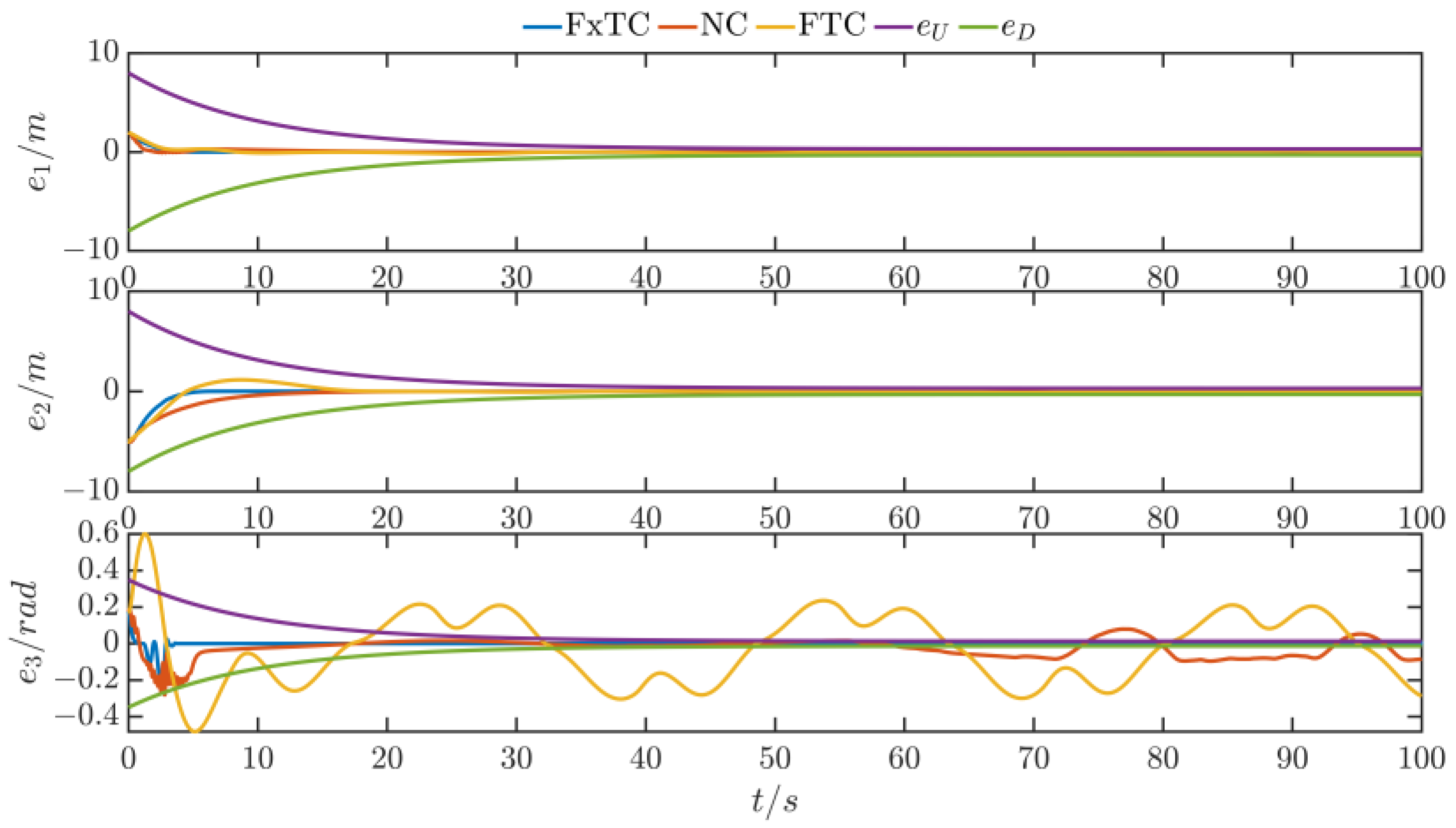
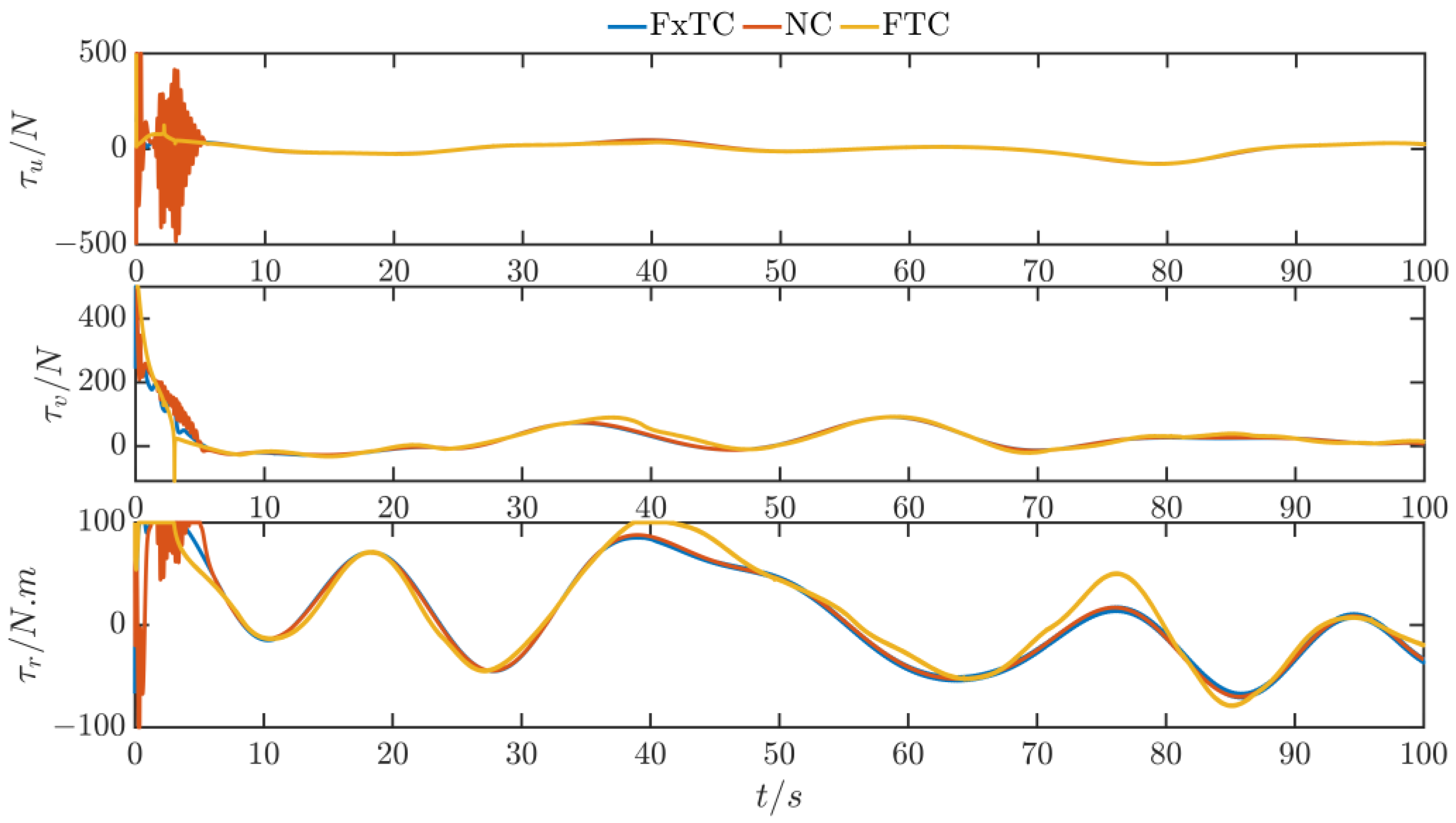
4.2. Simulation Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jiang, K.; Mao, L.; Su, Y.; Zheng, Y. Trajectory tracking control for underactuated USV with prescribed performance and input quantization. Symmetry 2021, 13, 2208. [Google Scholar] [CrossRef]
- Qin, J.; Du, J. Robust adaptive asymptotic trajectory tracking control for underactuated surface vessels subject to unknown dynamics and input saturation. J. Mar. Sci. Technol. 2022, 27, 307–319. [Google Scholar] [CrossRef]
- Xiaoming, C.A.O.; Yong, W.; Hui, H.; Zhipeng, S.H.E.N. Dynamic surface backstepping trajectory tracking control of unmanned underwater vehicles with ocean current disturbances. Syst. Eng. Electron. 2021, 43, 1664–1672. (In Chinese) [Google Scholar]
- Shen, Z.; Wang, Q.; Dong, S.; Yu, H. Prescribed performance dynamic surface control for trajectory-tracking of unmanned surface vessel with input saturation. Appl. Ocean Res. 2021, 113, 102736. [Google Scholar] [CrossRef]
- Wang, H.; Dong, Z.; Qi, S.; Zhang, Z.; Zhang, H. Trajectory-tracking control of an underactuated unmanned surface vehicle based on quasi-infinite horizon model predictive control algorithm. Trans. Inst. Meas. Control 2022, 44, 2709–2718. [Google Scholar] [CrossRef]
- Abdelaal, M.; Fränzle, M.; Hahn, A. Nonlinear Model Predictive Control for trajectory tracking and collision avoidance of underactuated vessels with disturbances. Ocean Eng. 2018, 160, 168–180. [Google Scholar] [CrossRef]
- Lv, C.; Yu, H.; Chen, J.; Zhao, N.; Chi, J. Trajectory tracking control for unmanned surface vessel with input saturation and disturbances via robust state error IDA-PBC approach. J. Frankl. Inst. 2022, 359, 1899–1924. [Google Scholar] [CrossRef]
- Wu, G.X.; Ding, Y.; Tahsin, T.; Atilla, I. Adaptive neural network and extended state observer-based non-singular terminal sliding mode tracking control for an underactuated USV with unknown uncertainties. Appl. Ocean. Res. 2023, 135, 103560. [Google Scholar] [CrossRef]
- Dong, Z.; Wan, L.; Li, Y.; Liu, T.; Zhang, G. Trajectory tracking control of underactuated USV based on modified backstepping approach. Int. J. Nav. Archit. Ocean Eng. 2015, 7, 817–832. [Google Scholar] [CrossRef]
- Zhang, K.Q.; Zhou, X.F.; Meng, X.H.; Zhou, H.B. Three-dimensional integrated guidance and control design with fixed-time convergence. J. Beijing Univ. Aeronaut. Astronaut. 2023, 49, 842–852. (In Chinese) [Google Scholar]
- Swaroop, D.; Hedrick, J.K.; Yip, P.P.; Gerdes, J.C. Dynamic surface control for a class of nonlinear systems. IEEE Trans. Autom. Control 2000, 45, 1893–1899. [Google Scholar] [CrossRef]
- Shen, Z.P.; Zhang, X.L.; Zhang, N. Recursive sliding mode dynamic surface output feedback control for ship trajectory tracking based on neural network observer. Control Theory Appl. 2018, 35, 1092–1100. (In Chinese) [Google Scholar]
- Cao, X.F.; Liu, S.F.; Shi, G.Y.; Li, C.H. Trajectory tracking of unmanned surface vehicle based on model predictive control. Ship Eng. 2023, 45, 354–357. (In Chinese) [Google Scholar]
- Chen, Z.; Zhang, Y.; Nie, Y.; Tang, J.; Zhu, S. Adaptive sliding mode control design for nonlinear unmanned surface vessel using RBFNN and disturbance-observer. IEEE Access 2020, 8, 45457–45467. [Google Scholar] [CrossRef]
- Wang, N.; Gao, Y.; Shuailin, L.; Joo, M.E. Integral sliding mode based finite-time trajectory tracking control of unmanned surface vehicles with input saturations. Indian, J. Geo-Mar. Sci. 2017, 46, 2493–2501. [Google Scholar]
- Zhao, J.; Cai, C.T.; Qiao, R.J. Finite-time dynamic prescribed performance control for surface unmanned vehicles with unknow disturbance. CAAI Trans. Intell. Syst. 2023, 18, 849–857. (In Chinese) [Google Scholar]
- Polyakov, A. Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Trans. Autom. Control 2011, 57, 2106–2110. [Google Scholar] [CrossRef]
- Wang, N.; Wang, R.H.; Lu, T. Fixed-time precision tracking control of an unmanned surface vehicle constrained by thruster saturations. Control Theory Appl. 2023, 40, 55–64. (In Chinese) [Google Scholar]
- Dai, Y.; Yang, C.; Yu, S.; Mao, Y.; Zhao, Y. Finite-time trajectory tracking for marine vessel by nonsingular backstepping controller with unknown external disturbance. IEEE Access 2019, 7, 165897–165907. [Google Scholar] [CrossRef]
- Xu, D.; Liu, Z.; Song, J.; Zhou, X. Finite time trajectory tracking with full-state feedback of underactuated unmanned surface vessel based on nonsingular fast terminal sliding mode. J. Mar. Sci. Eng. 2022, 10, 1845. [Google Scholar] [CrossRef]
- Liu, W.; Ye, H.; Yang, X. Super-twisting sliding mode control for the trajectory tracking of underactuated USVs with disturbances. J. Mar. Sci. Eng. 2023, 11, 636. [Google Scholar] [CrossRef]
- Gao, Z.; Guo, G. Command-filtered fixed-time trajectory tracking control of surface vehicles based on a disturbance observer. Int. J. Robust Nonlinear Control 2019, 29, 4348–4365. [Google Scholar] [CrossRef]
- Jiang, T.; Yan, Y.; Yu, S.H. Adaptive sliding mode control for unmanned surface vehicles with predefined-time tracking performances. J. Mar. Sci. Eng. 2023, 11, 1244. [Google Scholar] [CrossRef]
- Feng, N.; Wu, D.; Yu, H.; Yamashita, A.S.; Huang, Y. Predictive compensator-based event-triggered model predictive control with nonlinear disturbance observer for unmanned surface vehicle under cyber-attacks. Ocean Eng. 2022, 259, 111868. [Google Scholar] [CrossRef]
- Liu, C.; Han, X.; Sun, C.; Chen, X.; Shao, X. Adaptive dynamic positioning control of an offshore wind turbine installation vessel subjected to thruster dynamics and input constraints. Ocean Eng. 2024, 292, 116516. [Google Scholar] [CrossRef]
- Skjetne, R.; Fossen, T.I.; Kokotović, P.V. Adaptive maneuvering, with experiments, for a model ship in a marine control laboratory. Automatica 2005, 41, 289–298. [Google Scholar] [CrossRef]
- Zhu, G.; Du, J. Global robust adaptive trajectory tracking control for surface ships under input saturation. IEEE J. Ocean. Eng. 2018, 45, 442–450. [Google Scholar] [CrossRef]
- Cao, S.; Sun, L.; Jiang, J.; Zuo, Z. Reinforcement learning-based fixed-time trajectory tracking control for uncertain robotic manipulators with input saturation. IEEE Trans. Neural Netw. Learn. Syst. 2023, 34, 4584–4595. [Google Scholar] [CrossRef]
- Gao, Z.Y.; Guo, G. Fixed-time formation control of AUVs based on a disturbance observer. Acta Autom. Sin. 2019, 45, 1094–1102. (In Chinese) [Google Scholar]
- Sun, M.W.; Ren, L.; Liu, J.; Sun, C.Y. Dynamic event-triggered fixed-time consensus control of multi-agent systems under switching topologies. Acta Autom. Sin. 2023, 49, 1295–1305. (In Chinese) [Google Scholar]
- Farrell, J.A.; Polycarpou, M.; Sharma, M.; Dong, W. Command filtered backstepping. IEEE Trans. Autom. Control 2009, 54, 1391–1395. [Google Scholar] [CrossRef]
- Zhang, X.L.; Shen, Z.P.; Bi, Y.N. Adaptive dynamic surface sliding mode control for ship trajectory tracking with disturbance observer. Ship Eng. 2018, 40, 81–87. (In Chinese) [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sui, B.; Zhang, J.; Liu, Z.; Wei, J. Fixed-Time Trajectory Tracking Control of Fully Actuated Unmanned Surface Vessels with Error Constraints. J. Mar. Sci. Eng. 2024, 12, 584. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse12040584
Sui B, Zhang J, Liu Z, Wei J. Fixed-Time Trajectory Tracking Control of Fully Actuated Unmanned Surface Vessels with Error Constraints. Journal of Marine Science and Engineering. 2024; 12(4):584. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse12040584
Chicago/Turabian StyleSui, Bowen, Jianqiang Zhang, Zhong Liu, and Junbao Wei. 2024. "Fixed-Time Trajectory Tracking Control of Fully Actuated Unmanned Surface Vessels with Error Constraints" Journal of Marine Science and Engineering 12, no. 4: 584. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse12040584