
Clustering-Based Classification of Polygonal Wheels in a Railway Freight Vehicle Using a Wayside System
 , , , ,
, , , ,  ,
,  and
and
Abstract
:1. Introduction
- Proposed an automatic methodology capable of identifying different types of polygonal wheels according to harmonic number (harmonic-based) and according to defect amplitude (amplitude-based);
2. Unsupervised Learning Methodology for Polygonal Wheels Classification
Methodology
3. Simulation
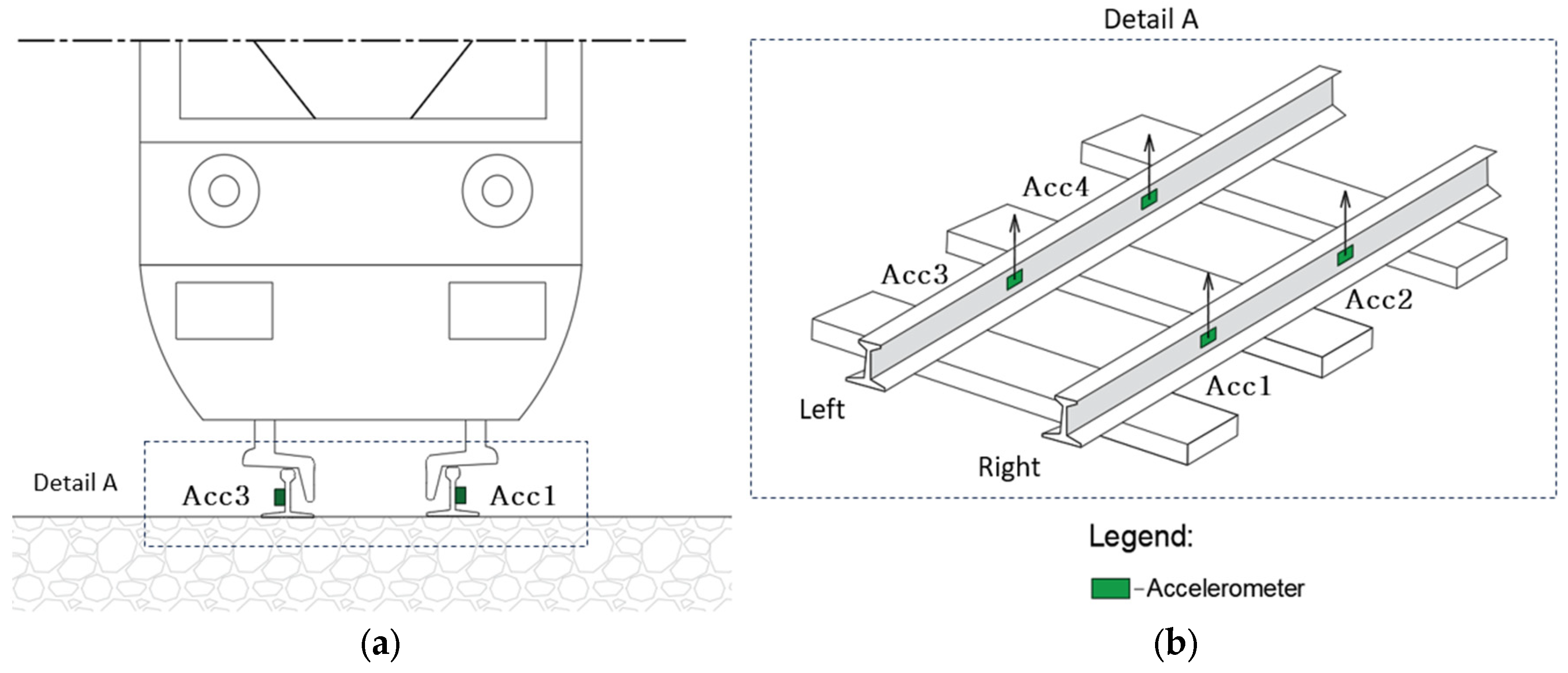
3.1. Wayside System Layout
3.2. Vehicle-Track Dynamic Interaction
3.3. Wheel Irregularities
3.3.1. Characterization
3.3.2. Wheel Profiles
3.4. Track Irregularity Profiles
3.5. Simulation Scenarios
3.6. Track Dynamic Response
4. Automatic Classification of Polygonal Wheels
4.1. Feature Extraction
- Matrix XPCA with 115 × 4, PCA features;
- Matrix XCWT with 115 × 324, CWT features.
4.2. Data Fusion
4.3. Feature Classification
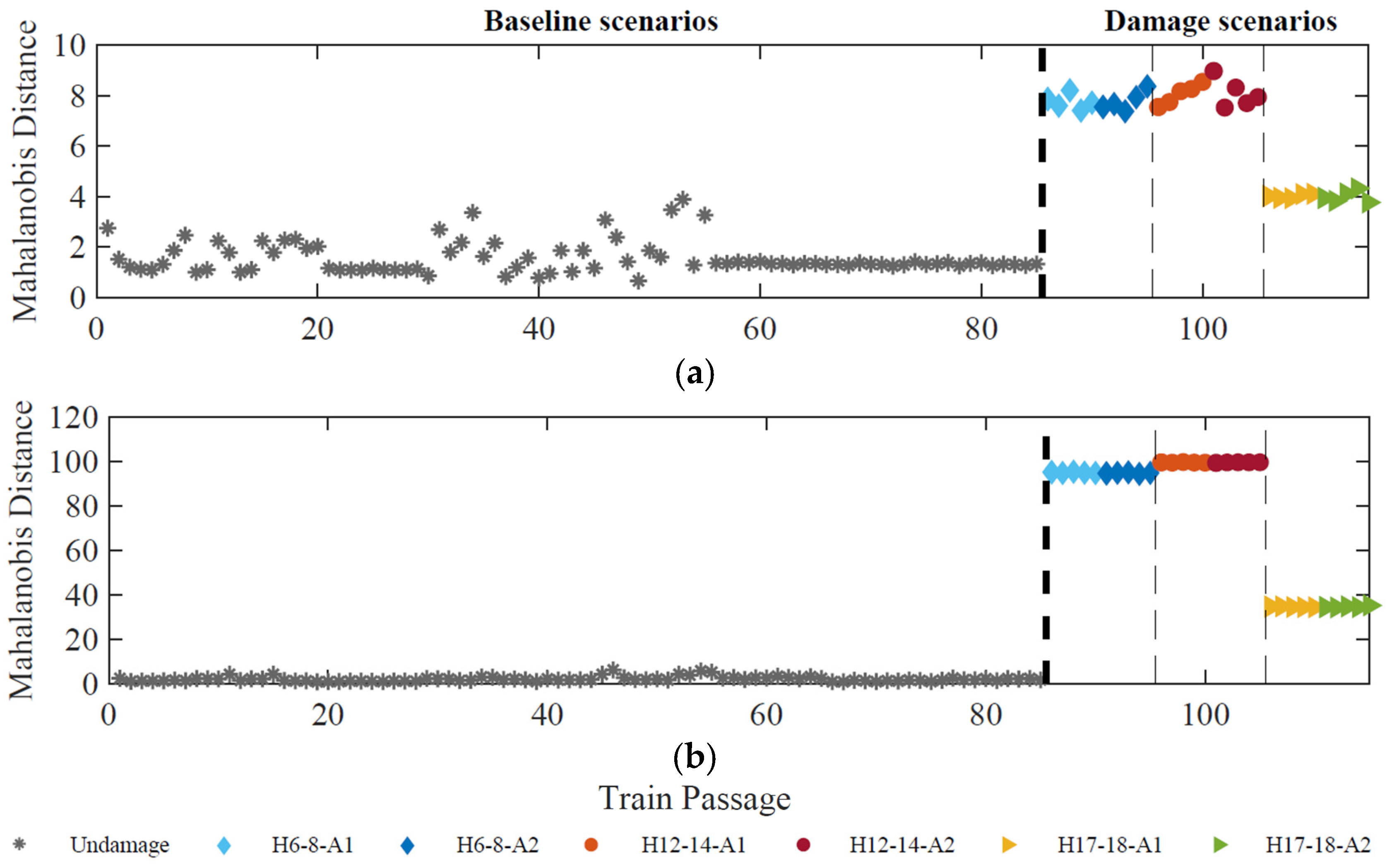
4.3.1. Harmonics-Based Classification
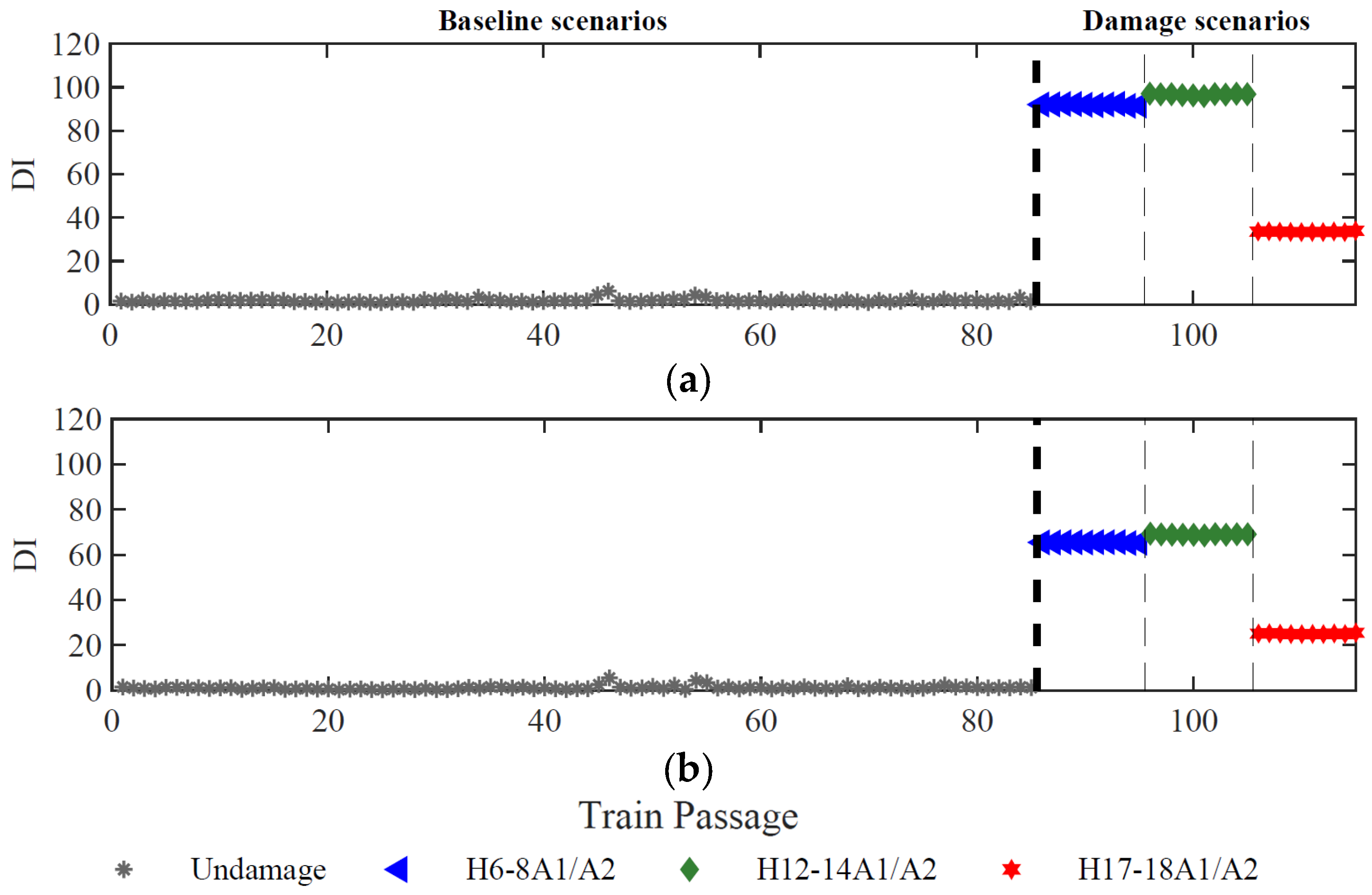
4.3.2. Amplitude-Based Classification
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Nielsen, J.C.O.; Johansson, A. Out-of-round railway wheels—A literature survey. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2000, 214, 79–91. [Google Scholar] [CrossRef]
- Barke, D.; Chiu, W.K. Structural Health Monitoring in the Railway Industry: A Review. Struct. Health Monit. 2005, 4, 81–93. [Google Scholar] [CrossRef]
- Nielsen, J.C.O.; Lundén, R.; Johansson, A.; Vernersson, T. Train-Track Interaction and Mechanisms of Irregular Wear on Wheel and Rail Surfaces. Veh. Syst. Dyn. 2003, 40, 3–54. [Google Scholar] [CrossRef]
- Chong, S.Y.; Shin, H. A review of health and operation monitoring technologies for trains. Smart Struct. Syst. 2010, 6, 1079–1105. [Google Scholar] [CrossRef]
- Johansson, A.; Andersson, C. Out-of-round railway wheels—A study of wheel polygonalization through simulation of three-dimensional wheel-rail interaction and wear. Veh. Syst. Dyn. 2005, 43, 539–559. [Google Scholar] [CrossRef]
- Peng, B. Mechanisms of Railway Wheel Polygonization. Ph.D. Thesis, University of Huddersfield, Huddersfield, UK, 2020. [Google Scholar]
- Ni, Y.-Q.; Zhang, Q.-H. A Bayesian machine learning approach for online detection of railway wheel defects using track-side monitoring. Struct. Health Monit. 2021, 20, 1536–1550. [Google Scholar] [CrossRef]
- Bogacz, R.; Frischmuth, K. On dynamic effects of wheel–rail interaction in the case of Polygonalisation. Mech. Syst. Signal Process. 2016, 79, 166–173. [Google Scholar] [CrossRef]
- Nielsen, J. 8—Out-of-round railway wheels. In Wheel–Rail Interface Handbook; Lewis, R., Olofsson, U., Eds.; Woodhead Publishing: Sawston, UK, 2009; pp. 245–279. [Google Scholar]
- Zhang, J.; Han, G.-x.; Xiao, X.-b.; Wang, R.-q.; Zhao, Y.; Jin, X.-s. Influence of wheel polygonal wear on interior noise of high-speed trains. J. Zhejiang Univ. Sci. A 2014, 15, 1002–1018. [Google Scholar] [CrossRef]
- Wu, X.; Chi, M.; Wu, P. Influence of polygonal wear of railway wheels on the wheel set axle stress. Veh. Syst. Dyn. 2015, 53, 1535–1554. [Google Scholar] [CrossRef]
- Wu, X.; Rakheja, S.; Qu, S.; Wu, P.; Zeng, J.; Ahmed, A.K.W. Dynamic responses of a high-speed railway car due to wheel polygonalisation. Veh. Syst. Dyn. 2018, 56, 1817–1837. [Google Scholar] [CrossRef]
- Żurek, Z.; Bizon, K.; Bernd, R. Supplementary magnetic tests for railway wheel sets. Transp. Probl. 2008, 3/2008, 5–10. [Google Scholar]
- Dwyer-Joyce, R.S.; Yao, C.; Lewis, R.; Brunskill, H. An ultrasonic sensor for monitoring wheel flange/rail gauge corner contact. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2012, 227, 188–195. [Google Scholar] [CrossRef]
- Li, C.; Luo, S.; Cole, C.; Spiryagin, M. An overview: Modern techniques for railway vehicle on-board health monitoring systems. Veh. Syst. Dyn. 2017, 55, 1045–1070. [Google Scholar] [CrossRef]
- Sun, Q.; Chen, C.; Kemp, A.H.; Brooks, P. An on-board detection framework for polygon wear of railway wheel based on vibration acceleration of axle-box. Mech. Syst. Signal Process. 2021, 153, 107540. [Google Scholar] [CrossRef]
- Mosleh, A.; Montenegro, P.A.; Alves Costa, P.; Calçada, R. An approach for wheel flat detection of railway train wheels using envelope spectrum analysis. Struct. Infrastruct. Eng. 2020, 17, 1710–1729. [Google Scholar] [CrossRef]
- Lai, C.C.; Kam, J.C.P.; Leung, D.C.C.; Lee, T.K.Y.; Tam, A.Y.M.; Ho, S.L.; Tam, H.Y.; Liu, M.S.Y. Development of a Fiber-Optic Sensing System for Train Vibration and Train Weight Measurements in Hong Kong. J. Sens. 2012, 2012, 365165. [Google Scholar] [CrossRef]
- Salzburger, H.-J.; Wang, L.; Gao, X. In-motion ultrasonic testing of the tread of high-speed railway wheels using the inspection system AUROPA III. Insight-Non-Destr. Test. Cond. Monit. 2009, 51, 370–372. [Google Scholar] [CrossRef]
- Amini, A.; Entezami, M.; Huang, Z.; Rowshandel, H.; Papaelias, M. Wayside detection of faults in railway axle bearings using time spectral kurtosis analysis on high frequency acoustic emission signals. Adv. Mech. Eng. 2016, 8, 1687814016676000. [Google Scholar] [CrossRef]
- Lagnebäck, R. Evaluation of Wayside Condition Monitoring Technologies for Condition-Based Maintenance of Railway Vehicles. Master’s Thesis, Luleå University of Technology, Luleå, Sweden, 2007; p. 119. [Google Scholar]
- Kuźnar, M.; Lorenc, A. A Method of Predicting Wear and Damage of Pantograph Sliding Strips Based on Artificial Neural Networks. Materials 2022, 15, 98. [Google Scholar] [CrossRef] [PubMed]
- Ye, Y.; Zhu, B.; Huang, P.; Peng, B. OORNet: A deep learning model for on-board condition monitoring and fault diagnosis of out-of-round wheels of high-speed trains. Measurement 2022, 199, 111268. [Google Scholar] [CrossRef]
- Zhang, L.; Cheng, L.; Li, H.; Gao, J.; Yu, C.; Domel, R.; Yang, Y.; Tang, S.; Liu, W.K. Hierarchical deep-learning neural networks: Finite elements and beyond. Comput. Mech. 2021, 67, 207–230. [Google Scholar] [CrossRef]
- Xu, Z.; Wang, H.; Xing, C.; Tao, T.; Mao, J.; Liu, Y. Physics guided wavelet convolutional neural network for wind-induced vibration modeling with application to structural dynamic reliability analysis. Eng. Struct. 2023, 297, 117027. [Google Scholar] [CrossRef]
- Lieu, Q.X. A deep neural network-assisted metamodel for damage detection of trusses using incomplete time-series acceleration. Expert Syst. Appl. 2023, 233, 120967. [Google Scholar] [CrossRef]
- Guedes, A.; Silva, R.; Ribeiro, D.; Vale, C.; Mosleh, A.; Montenegro, P.; Meixedo, A. Detection of Wheel Polygonization Based on Wayside Monitoring and Artificial Intelligence. Sensors 2023, 23, 2188. [Google Scholar] [CrossRef]
- Meixedo, A.; Ribeiro, D.; Santos, J.; Calçada, R.; Todd, M.D. Real-Time Unsupervised Detection of Early Damage in Railway Bridges Using Traffic-Induced Responses. In Structural Health Monitoring Based on Data Science Techniques; Cury, A., Ribeiro, D., Ubertini, F., Todd, M.D., Eds.; Springer International Publishing: Cham, Germany, 2022; pp. 117–142. [Google Scholar]
- Mohammadi, M.; Mosleh, A.; Vale, C.; Ribeiro, D.; Montenegro, P.; Meixedo, A. An Unsupervised Learning Approach for Wayside Train Wheel Flat Detection. Sensors 2023, 23, 1910. [Google Scholar] [CrossRef]
- Wang, Q.; Xiao, Z.; Zhou, J.; Gong, D.; Wang, Z.; Zhang, Z.; Wang, T.; He, Y. A new DFT-based dynamic detection framework for polygonal wear state of railway wheel. Veh. Syst. Dyn. 2023, 61, 2051–2073. [Google Scholar] [CrossRef]
- Song, Y.; Liang, L.; Du, Y.; Sun, B. Railway Polygonized Wheel Detection Based on Numerical Time-Frequency Analysis of Axle-Box Acceleration. Appl. Sci. 2020, 10, 1613. [Google Scholar] [CrossRef]
- Chen, S.; Wang, K.; Zhou, Z.; Yang, Y.; Chen, Z. Quantitative detection of locomotive wheel polygonization under non-stationary conditions by adaptive chirp mode decomposition. Railw. Eng. Sci. 2022, 30, 129–147. [Google Scholar] [CrossRef]
- Xie, B.; Chen, S.; Xu, M.; Dong, M.; Wang, K. Parameter Identification of Wheel Polygonization Based on Effective Signal Extraction and Inertial Principle. IEEE Sens. J. 2023, 23, 5061–5072. [Google Scholar] [CrossRef]
- Ye, Y.; Wei, L.; Li, F.; Zeng, J.; Hecht, M. Multislice Time-Frequency image Entropy as a feature for railway wheel fault diagnosis. Measurement 2023, 216, 112862. [Google Scholar] [CrossRef]
- Ye, Y.; Huang, C.; Zeng, J.; Zhou, Y.; Li, F. Shock detection of rotating machinery based on activated time-domain images and deep learning: An application to railway wheel flat detection. Mech. Syst. Signal Process. 2023, 186, 109856. [Google Scholar] [CrossRef]
- Stratman, B.; Liu, Y.; Mahadevan, S. Structural Health Monitoring of Railroad Wheels Using Wheel Impact Load Detectors. J. Fail. Anal. Prev. 2007, 7, 218–225. [Google Scholar] [CrossRef]
- Johansson, A.; Nielsen, J. Out-of-round railway wheels—Wheel-rail contact forces and track response derived from field tests and numerical simulations. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2003, 217, 135–146. [Google Scholar] [CrossRef]
- Zhou, C.; Gao, L.; Xiao, H.; Hou, B. Railway Wheel Flat Recognition and Precise Positioning Method Based on Multisensor Arrays. Appl. Sci. 2020, 10, 1297. [Google Scholar] [CrossRef]
- Alemi, A.; Corman, F.; Pang, Y.; Lodewijks, G. Reconstruction of an informative railway wheel defect signal from wheel–rail contact signals measured by multiple wayside sensors. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2018, 233, 49–62. [Google Scholar] [CrossRef]
- Skarlatos, D.; Karakasis, K.; Trochidis, A. Railway wheel fault diagnosis using a fuzzy-logic method. Appl. Acoust. 2004, 65, 951–966. [Google Scholar] [CrossRef]
- Belotti, V.; Crenna, F.; Michelini, R.C.; Rossi, G.B. Wheel-flat diagnostic tool via wavelet transform. Mech. Syst. Signal Process. 2006, 20, 1953–1966. [Google Scholar] [CrossRef]
- Lourenço, A.; Ferraz, C.; Ribeiro, D.; Mosleh, A.; Montenegro, P.; Vale, C.; Meixedo, A.; Marreiros, G. Adaptive time series representation for out-of-round railway wheels fault diagnosis in wayside monitoring. Eng. Fail. Anal. 2023, 152, 107433. [Google Scholar] [CrossRef]
- Wang, Y.W.; Ni, Y.Q.; Wang, X. Real-time defect detection of high-speed train wheels by using Bayesian forecasting and dynamic model. Mech. Syst. Signal Process. 2020, 139, 106654. [Google Scholar] [CrossRef]
- Liu, X.-Z.; Ni, Y.-Q. Wheel tread defect detection for high-speed trains using FBG-based online monitoring techniques. Smart Struct. Syst. 2018, 21, 687–694. [Google Scholar]
- Meixedo, A.; Ribeiro, D.; Santos, J.; Calçada, R.; Todd, M. 18—Structural health monitoring strategy for damage detection in railway bridges using traffic induced dynamic responses. In Rail Infrastructure Resilience; Calçada, R., Kaewunruen, S., Eds.; Woodhead Publishing: Sawston, UK, 2022; pp. 389–408. [Google Scholar]
- Yan, A.-M.; Kerschen, G.; Boe, P.; Golinval, J.C. Structural damage diagnosis under varying environmental conditions—Part I: A linear analysis. Mech. Syst. Signal Process. 2005, 19, 847–864. [Google Scholar] [CrossRef]
- Addison, P.S. Introduction to redundancy rules: The continuous wavelet transform comes of age. Philos. Trans. R. Soc. A 2018, 376, 20170258. [Google Scholar] [CrossRef]
- Pan, Y.; Sun, Y.; Li, Z.; Gardoni, P. Machine learning approaches to estimate suspension parameters for performance degradation assessment using accurate dynamic simulations. Reliab. Eng. Syst. Saf. 2023, 230, 108950. [Google Scholar] [CrossRef]
- Arthur, D.; Vassilvitskii, S. k-means++: The advantages of careful seeding. In Proceedings of the Eighteenth Annual ACM-SIAM Symposium on Discrete Algorithms, New Orleans, LA, USA, 7–9 January 2007; Society for Industrial and Applied Mathematics: New Orleans, LA, USA, 2007; pp. 1027–1035. [Google Scholar]
- Montenegro, P.A.; Calçada, R. Wheel–rail contact model for railway vehicle–structure interaction applications: Development and validation. Railw. Eng. Sci. 2023, 31, 181–206. [Google Scholar] [CrossRef]
- Mosleh, A.; Montenegro, P.A.; Costa, P.A.; Calçada, R. Railway Vehicle Wheel Flat Detection with Multiple Records Using Spectral Kurtosis Analysis. Appl. Sci. 2021, 11, 4002. [Google Scholar] [CrossRef]
- MATLAB®, version R2018a; The MathWorks Inc.: Natick, MA, USA, 2018.
- ANSYS®, ANSYS, Inc.: Canonsburg, PA, USA.
- Bragança, C.; Neto, J.; Pinto, N.; Montenegro, P.A.; Ribeiro, D.; Carvalho, H.; Calçada, R. Calibration and validation of a freight wagon dynamic model in operating conditions based on limited experimental data. Veh. Syst. Dyn. 2022, 60, 3024–3050. [Google Scholar] [CrossRef]
- Mosleh, A.; PCosta, A.; Calçada, R. A new strategy to estimate static loads for the dynamic weighing in motion of railway vehicles. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2020, 234, 183–200. [Google Scholar] [CrossRef]
- Cai, W.; Chi, M.; Tao, G.; Wu, X.; Wen, Z. Experimental and Numerical Investigation into Formation of Metro Wheel Polygonalization. Shock. Vib. 2019, 2019, 1538273. [Google Scholar] [CrossRef]
- Tao, G.; Xie, C.; Wang, H.; Yang, X.; Ding, C.; Wen, Z. An investigation into the mechanism of high-order polygonal wear of metro train wheels and its mitigation measures. Veh. Syst. Dyn. 2021, 59, 1557–1572. [Google Scholar] [CrossRef]
- Wu, X.; Rakheja, S.; Cai, W.; Chi, M.; Ahmed, A.K.W.; Qu, S. A study of formation of high order wheel polygonalization. Wear 2019, 424–425, 1–14. [Google Scholar] [CrossRef]
- EN 13848-2; Railway Applications—Track—Track Geometry Quality—Part 2: Measuring Systems—Track Recording Vehicles. European Committee for Standardization: Brussels, Switzerland, 2006.
- Casas, J.R.; Moughty, J.J. Bridge Damage Detection Based on Vibration Data: Past and New Developments. Front. Built Environ. 2017, 3, 4. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Baseline Scenarios | Damaged Scenarios | ||
|---|---|---|---|
| Perfect wheel | New wheel | Polygonal wheel | |
| Vehicle | five freight wagons of the Laagrss type | ||
| Number of loading schemes | 3 | 1 (full load) | 1 (full load) |
| Unevenness profile | 4 | 1 | 3 |
| Speed range | 40–120 km/h | 80 km/h | 80 km/h |
| Noise Ratio | 5% | 5% | 5% |
| Location | 1st wagon 3rd wagon 5th wagon | 1st wagon | |
| Harmonic orders () | - | - | H6-8 H12-14 H17-18 |
| Amplitude ranges (W) | - | 0.030–0.040 mm | A1 [0.2–0.4] mm A2 [0.6–0.8] mm |
| Total analyses | 55 | 30 | 30 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guedes, A.; Silva, R.; Ribeiro, D.; Magalhães, J.; Jorge, T.; Vale, C.; Meixedo, A.; Mosleh, A.; Montenegro, P. Clustering-Based Classification of Polygonal Wheels in a Railway Freight Vehicle Using a Wayside System. Appl. Sci. 2024, 14, 3650. https://0-doi-org.brum.beds.ac.uk/10.3390/app14093650
Guedes A, Silva R, Ribeiro D, Magalhães J, Jorge T, Vale C, Meixedo A, Mosleh A, Montenegro P. Clustering-Based Classification of Polygonal Wheels in a Railway Freight Vehicle Using a Wayside System. Applied Sciences. 2024; 14(9):3650. https://0-doi-org.brum.beds.ac.uk/10.3390/app14093650
Chicago/Turabian StyleGuedes, António, Rúben Silva, Diogo Ribeiro, Jorge Magalhães, Tomás Jorge, Cecília Vale, Andreia Meixedo, Araliya Mosleh, and Pedro Montenegro. 2024. "Clustering-Based Classification of Polygonal Wheels in a Railway Freight Vehicle Using a Wayside System" Applied Sciences 14, no. 9: 3650. https://0-doi-org.brum.beds.ac.uk/10.3390/app14093650