
A New Type of Hydraulic Clutch with Magnetorheological Fluid: Theory and Experiment
 , ,
, ,
Abstract
:1. Introduction
2. Tests of the Hydraulic Clutch with MR Fluid
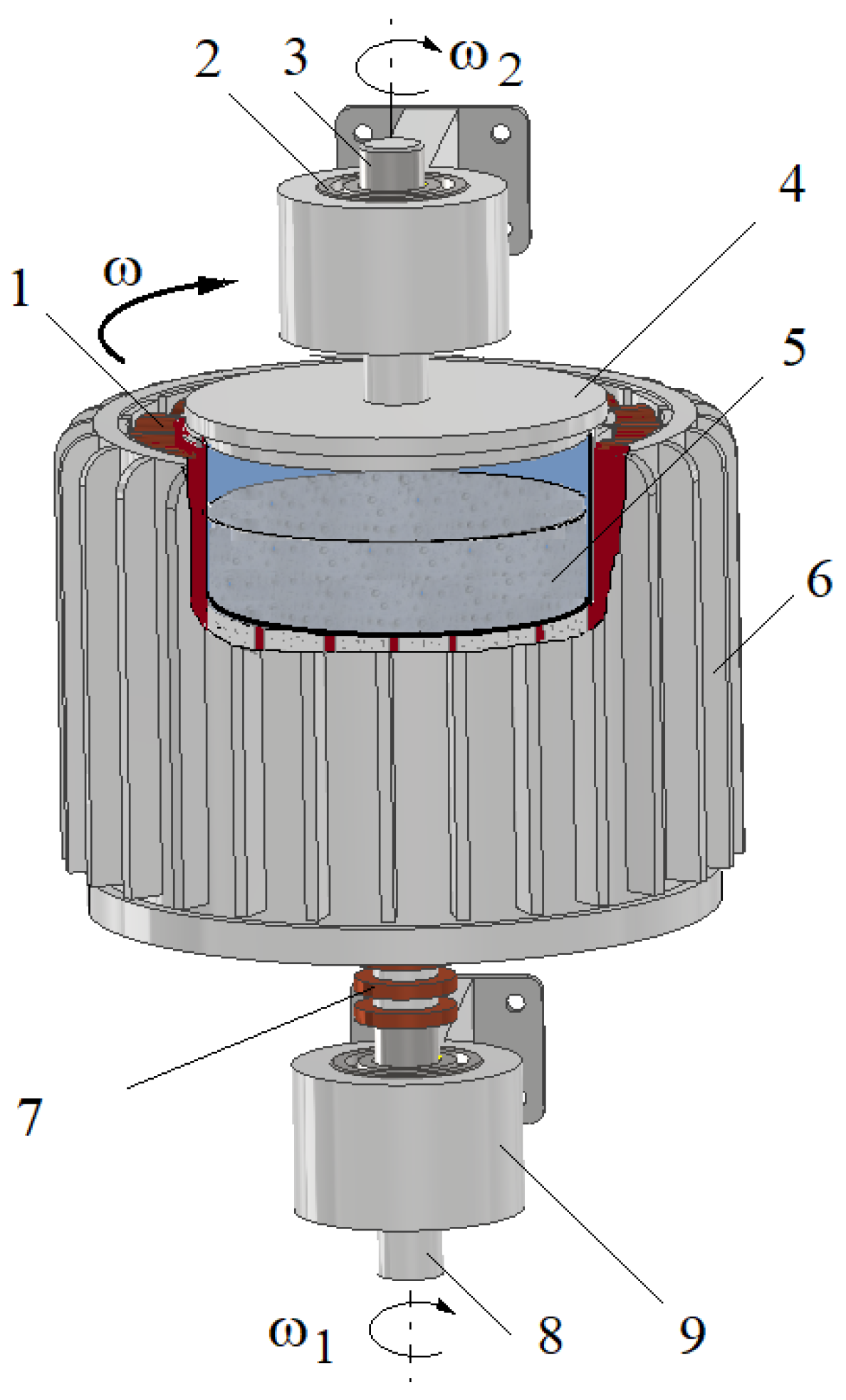
2.1. Construction of a Hydraulic Clutch with MR Fluid
2.2. Tested MR Fluids
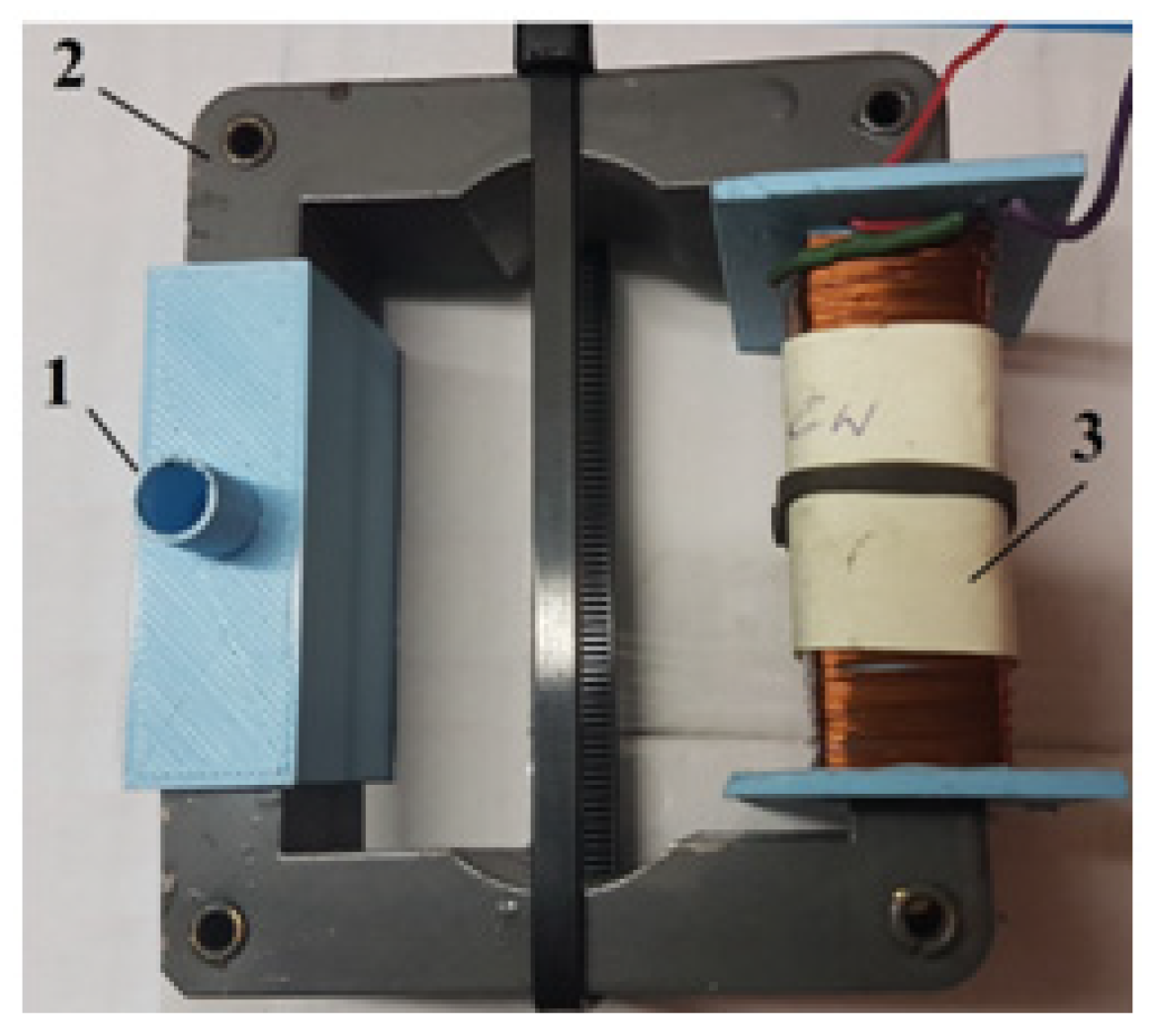
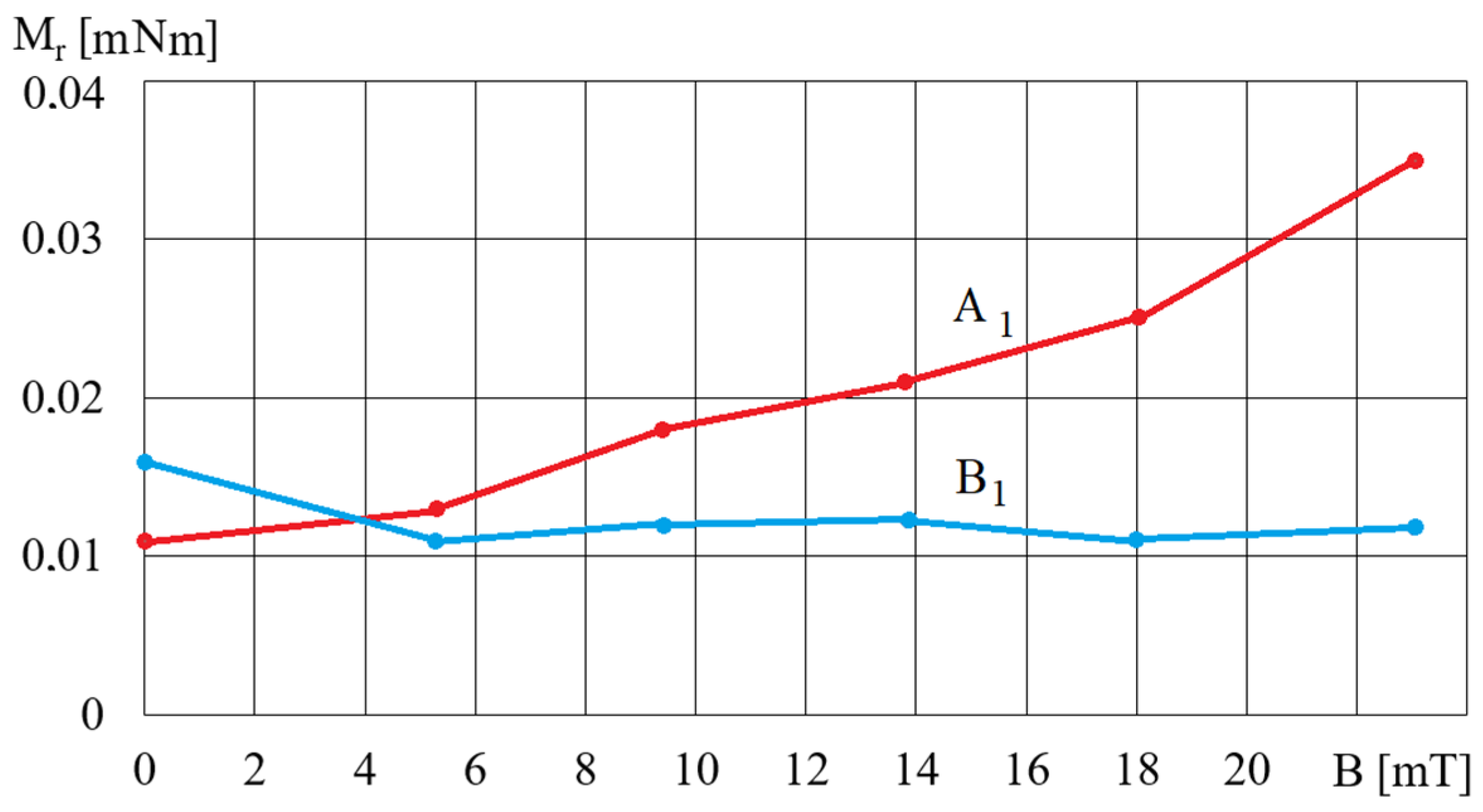
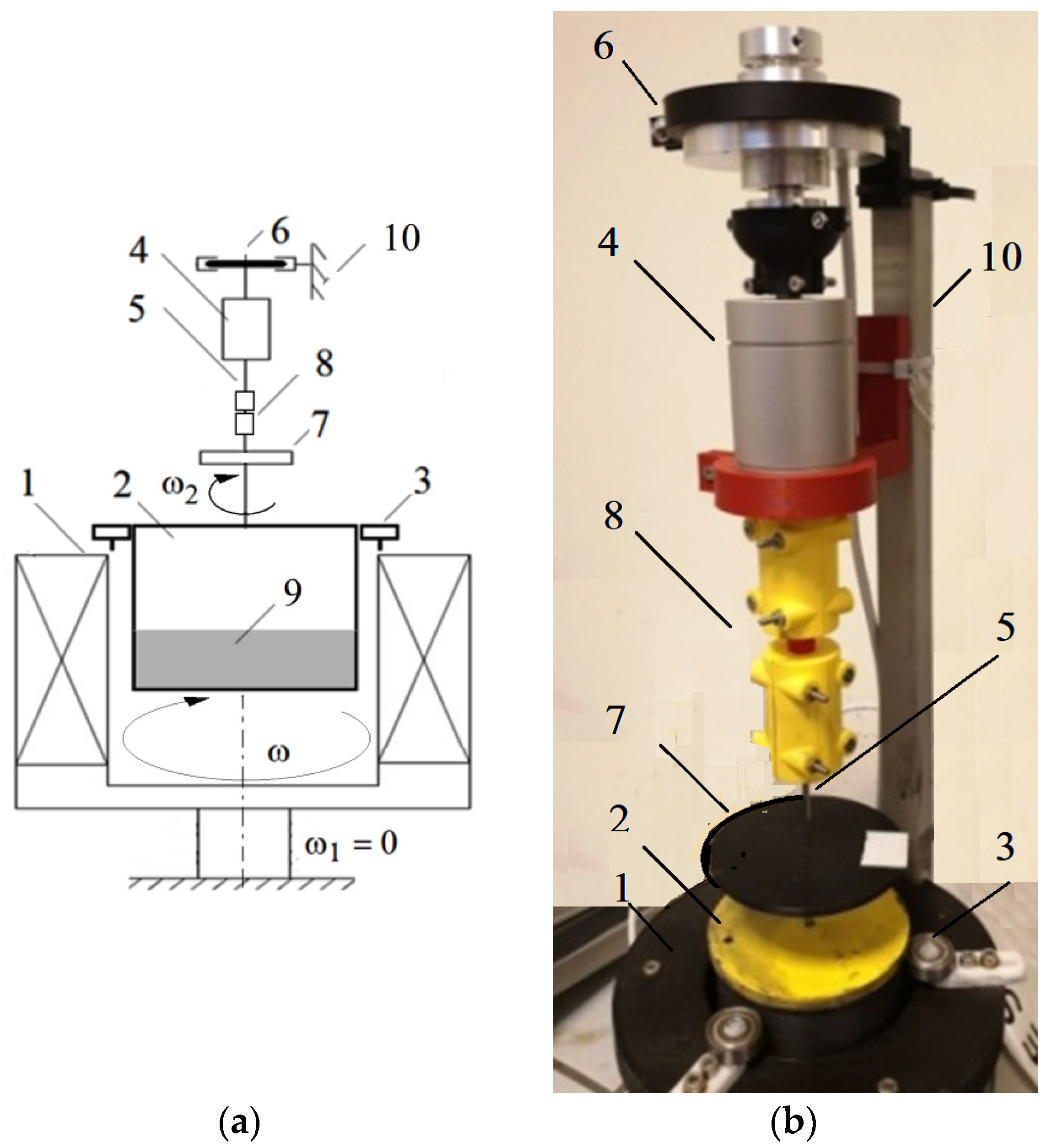
2.3. Testing the Rheological Properties of MR Fluids
2.4. Test Stand for the Hydraulic Clutch with MR Fluid
2.5. Phenomena Occurring during Operation of the Hydraulic Clutch with MR Fluid
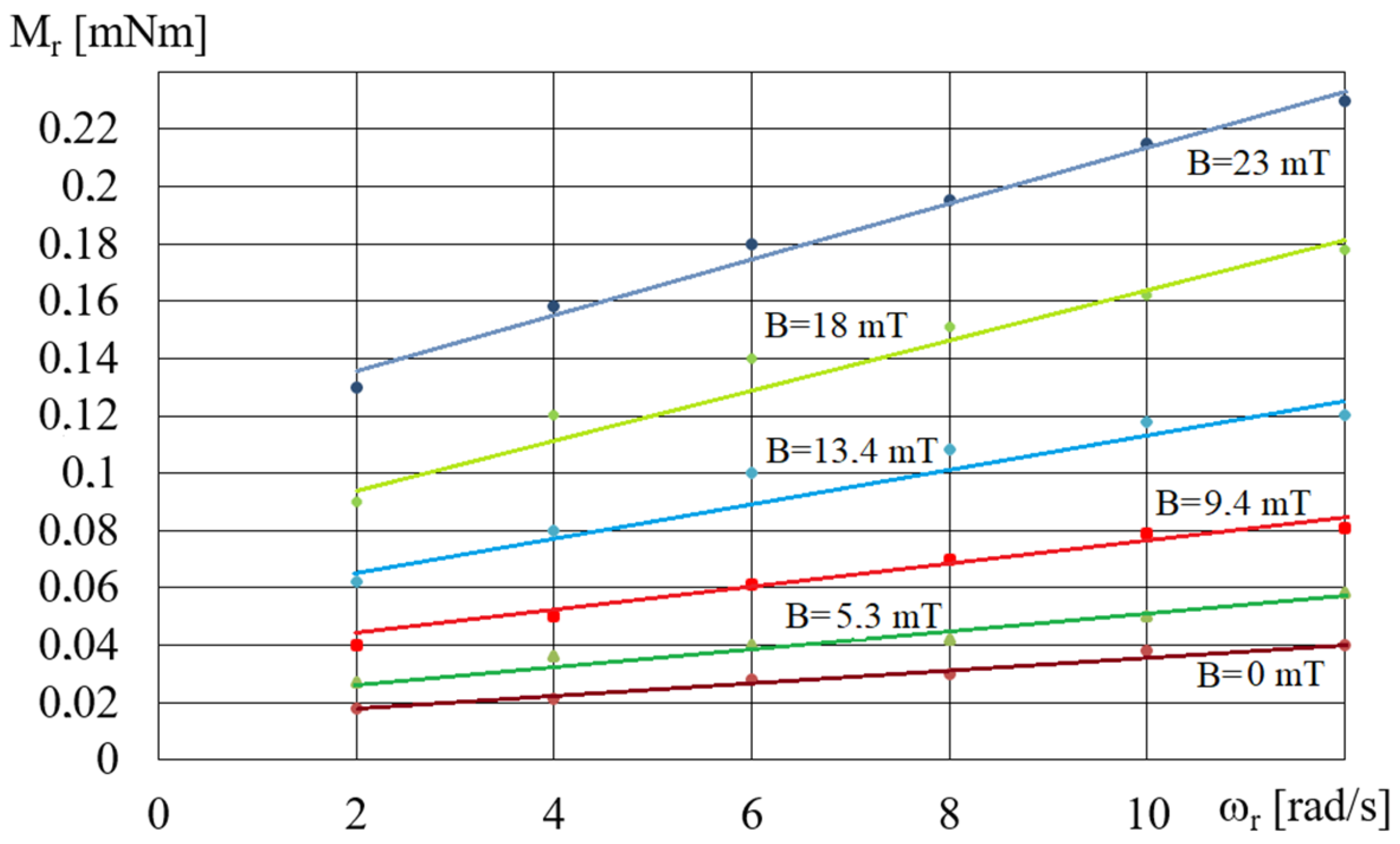
2.6. Test Results of the Characteristics of the Hydraulic Clutch with MR Fluid
3. Characteristics of the Hydraulic Clutch with MR Fluid
3.1. Operating Method of the Hydraulic Clutch with MR Fluid
3.2. Comparison of the Hydraulic Clutch with MR Fluid to Other Clutches
4. Conclusions
- (1)
- The literature review shows that a rotating magnetic field can cause macroscopic rotation of the MR fluid with a rotational speed lower than the rotational speed of the magnetic field. Whether such a movement will occur and what its direction will be depends on a number of factors related to the properties of the MR fluid and the operating conditions. Due to the complexity of the phenomena occurring, no single model has been developed so far to explain the causes of rotation of the MR fluid in a rotating magnetic field. Most authors believe that the shape of the model is significantly impacted by the inhomogeneities in the MR fluid affected by the rotating magnetic field.
- (2)
- The impact of the magnetic field on the rheological properties of MR fluids with varying sizes of iron particles, assessed using a customized rheometer with a magnetic device, can be accurately determined for MR fluids with iron particles having diameters not exceeding 6.5 μm. Iron particles with a larger diameter exhibit a stronger attraction towards the poles of the electromagnet situated outside the measuring gap. This results in a reduction of the iron content in the vicinity of the rheometer spindle, thereby limiting the influence of the magnetic field on the measured torque. Therefore, other measurement methods should be sought for MR fluids with larger iron particles.
- (3)
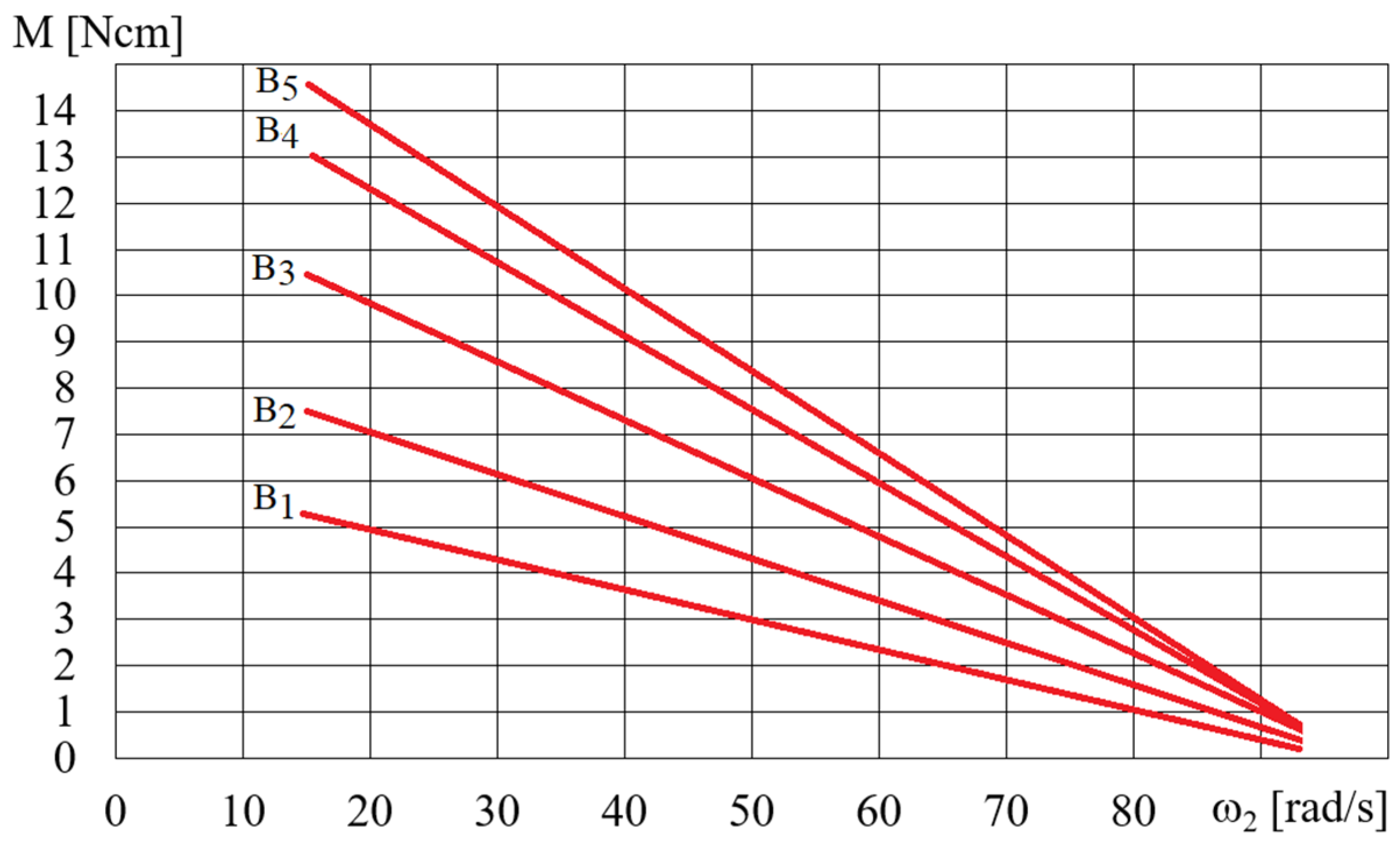
- In the absence of a load on the HCMR output shaft, the angular velocity of the beaker containing the MR fluid exhibits a linear dependence on the angular velocity of the magnetic field. However, during shaft braking, the torque transmitted by the clutch increases with higher angular velocity of the magnetic field and lower angular velocity of the beaker. The highest torque occurs for MR fluids with the highest iron content and solid particles with dimensions ranging from 3.5 to 6.5 μm.
- (4)
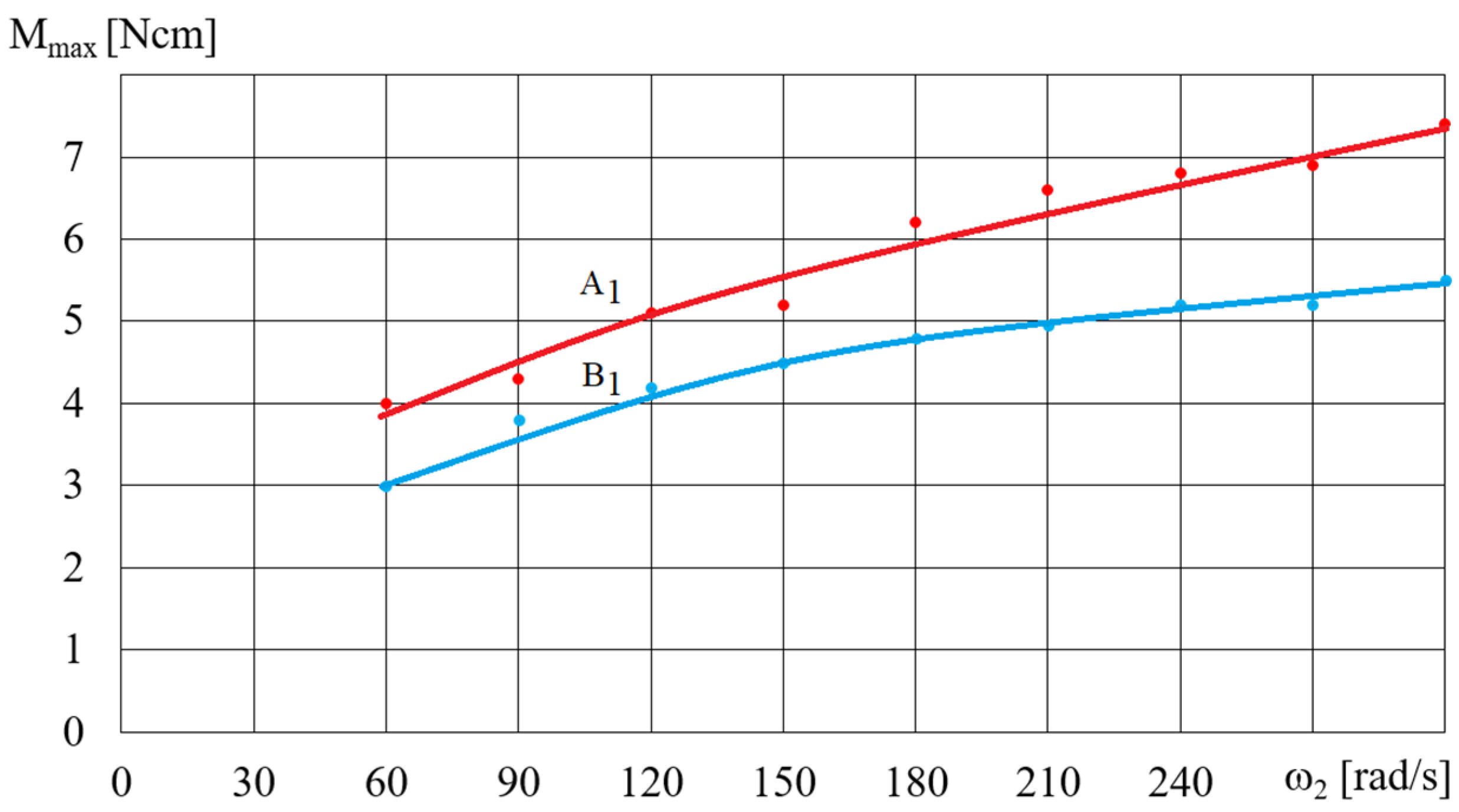
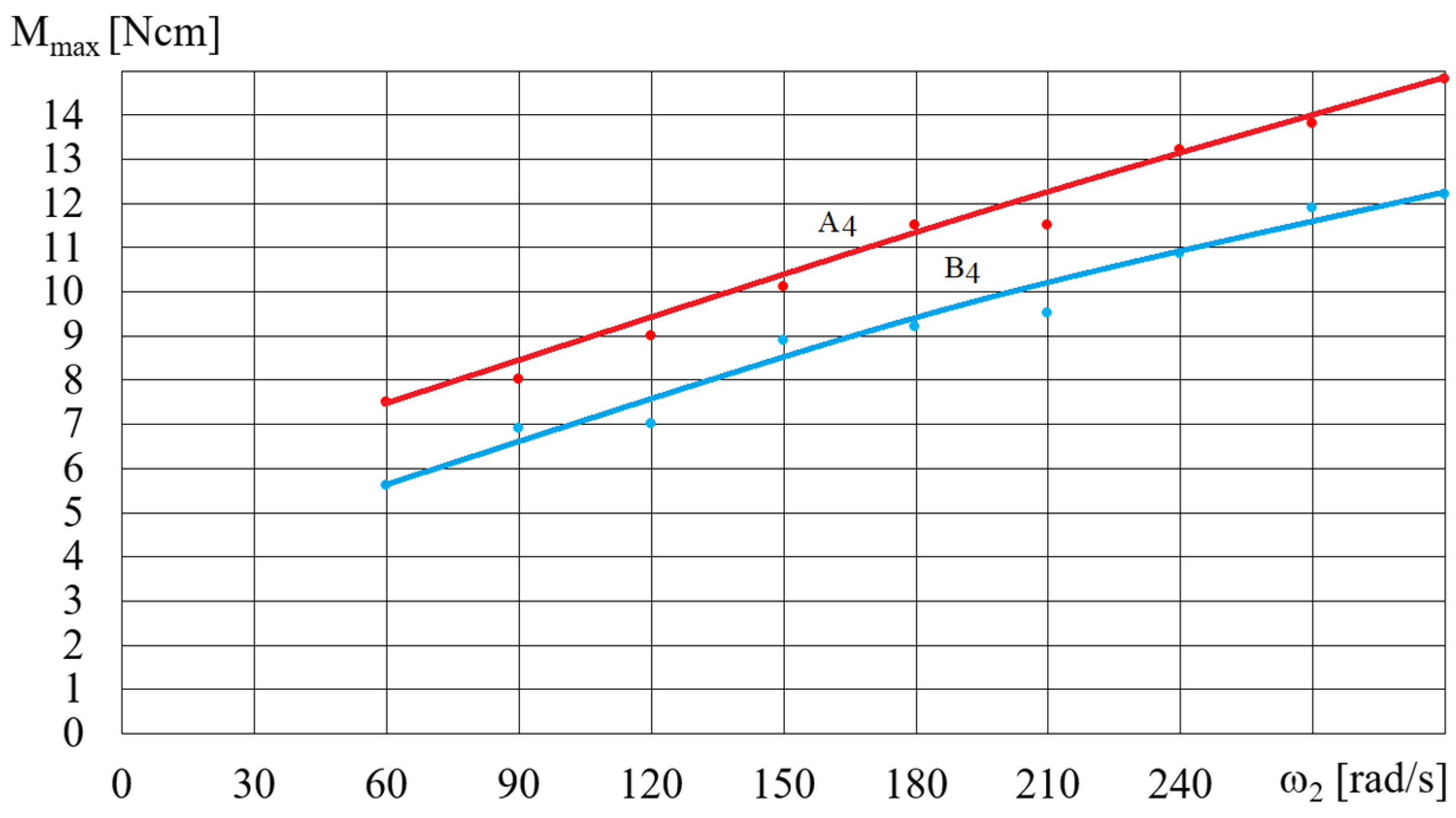
- The characteristics of HCMRs are similar to the characteristics of eddy current clutches and result mainly from the combined action of magnetic and centrifugal forces on the MR fluid. The solid particles of the MR fluid are attracted by the rotating magnetic field and simultaneously pressed against the walls of the beaker, mainly due to the influence of centrifugal forces. The rotational motion of the beaker is induced by the friction force generated due to the applied pressure. The magnitude of the friction force, which propels the rotation of the beaker, increases with the greater difference between the rotational speed of the magnetic field and that of the beaker. The viscous-plastic properties of the MR fluid cause the solid particles of the MR fluid to be slower than the rotation of the magnetic field.
- (5)
- It is finally remarked here that further research regarding HCMRs should aim to design, construct and test a clutch prototype and to select MR fluids with the optimal size and shape of solid particles so that the proposed system can be applicable to several types of the hydraulic control systems in real environments subject to various uncertainties such as time-varying temperature.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kluszczyński, K.; Pilch, Z. The choice of the optimal number of discs in an MR clutch from the viewpoint of different criteria and constraints. Energies 2021, 14, 6888. [Google Scholar] [CrossRef]
- Yang, Z.Q.; Kermani, M.R.A. Computationally efficient hysteresis model for magneto-rheological clutches and its comparison with other models. Actuators 2023, 12, 190. [Google Scholar] [CrossRef]
- Zhu, G.; Li, Z.; Dong, Y.; Liu, Q. Optimal design of torque converter blade angle based on surrogate model method. J. Phys. Conf. Ser. 2023, 2463, 012039. [Google Scholar] [CrossRef]
- Wu, X.; Guo, Y.; Tian, Z.; Xie, F.; Ji, J.; Li, H. Analysis on flow and temperature field of high-power magnetorheological fluid transmission device. Appl. Sci. 2022, 12, 5044. [Google Scholar] [CrossRef]
- Tung, S.C.; Lindol, J.L. Modeling torque converter clutch viscous damper performance. SAE Tech. Paper 1985, 94, 850459. [Google Scholar] [CrossRef]
- Naito, G.; Yaguchi, E.; Matuda, T.; Asahi, M.; Nakata, T.; Inokuchi, I. New electronically controlled torque split 4WD system for improving cornering performance. SAE Tech. Paper 1990, 99, 900556. [Google Scholar] [CrossRef] [PubMed]
- Chirico, D. Development and perspectives of the automotive industry. ATA—Ingegneria Automotoristica 1990, 43. [Google Scholar]
- Vorobyeva, T.M. Electromagnetic Clutches and Couplings; Pergamon Press: Oxford, UK, 1965; p. 82. [Google Scholar]
- Togawa, T.; Tachibana, T.; Tanaka, Y.; Peng, J. Hydro-disk-type of electrorheological brakes for small mobile robots. Int. J. Hydromechatron. 2021, 4, 99–115. [Google Scholar] [CrossRef]
- Olszak, A.; Osowski, K.; Kesy, A.; Kesy, Z. Experimental researches of hydraulic clutches with smart fluids. Int. Rev. Mech. Eng. 2016, 10, 364–372. [Google Scholar] [CrossRef]
- Choi, S.B.; Hong, S.R.; Cheong, C.C.; Park, Y.K. Comparison of field-controlled characteristics between ER and MR clutches. J. Intell. Mater. Syst. Struct. 1999, 10, 615–619. [Google Scholar] [CrossRef]
- Choi, S.B.; Lee, D.Y. Rotational motion control of a washing machine using electrorheological clutches and brakes. Proc. Inst. Mech. Eng. Part C 2005, 219, 627–637. [Google Scholar] [CrossRef]
- Musiałek, I.; Migus, M.; Osowski, K.; Olszak, A.; Kęsy, Z.; Kęsy, A.; Kim, G.W.; Choi, S.B. Analysis of a combined clutch with an electrorheological fluid. Smart Mater. Struct. 2020, 29, 087006. [Google Scholar] [CrossRef]
- Carlson, D.J. MR fluids and devices in the real world. Int. J. Mod. Phys. B 2005, 19, 1463–1470. [Google Scholar] [CrossRef]
- Genc, S.; Phule, P.P. Rheological properties of magnetorheological fluids. Smart Mater. Struct. 2002, 11, 140–146. [Google Scholar] [CrossRef]
- Sapiński, B.; Horak, W. Rheological properties of MR fluids recommended for use in shock absorbers. Acta Mech. Autom. 2013, 7, 107–110. [Google Scholar] [CrossRef]
- Do, X.P.; Choi, S.B. Magnetorheological fluid based devices reported in 2013–2018: Mini-review and comment on structural configurations. Front. Mater. 2019, 6, 19. [Google Scholar] [CrossRef]
- Carlson, J.D.; Catanzarite, D.M.; St. Clair, K.A. Commercial magneto–rheological fluid devices. Int. J. Mod. Phys. B 1996, 10, 2857–2865. [Google Scholar] [CrossRef]
- Gołdasz, J.; Sapiński, B. Insight into Magnetorheological Shock Absorbers; Springer International Publishing: Cham, Switzerland, 2015; p. 251. [Google Scholar]
- Cruze, D.; Latha, H.; Arunraj, E.; Jebadurai, V.S.; Sarala, L. A review on optimal design of magneto-rheological damper. Int. J. Mech. Prod. Eng. Res. Dev. 2018, 8, 569–578. [Google Scholar]
- Sapiński, B.; Rosół, M. MR damper performance for shock isolation. J. Theor. Appl. Mech. 2007, 45, 133–145. [Google Scholar]
- Milecki, A. Using of magnetorheological and electrgheological fluids in electrohydraulic servo control system. Hydraul. Pneum. 1998, 5, 16–25. [Google Scholar]
- Hu, G.; Liao, M.; Li, W. Analysis of a compact annular-radial orifice flow magnetorheological valve and evaluation of its performance. J. Intell. Mater. Syst. Struct. 2017, 28, 1322–1333. [Google Scholar] [CrossRef]
- Choi, S.B.; Choi, W.Y. Position control of a cylinder using a hydraulic bridge circuit with ER valves. J. Dyn. Syst. Meas. Control 2000, 122, 201–209. [Google Scholar] [CrossRef]
- Lara-Prieto, V.; Parkin, R.; Jackson, M.; Silberschmidt, V.; Kęsy, Z. Vibration characteristics of MR cantilever sandwich beams: Experimental study. Smart Mater. Struct. 2009, 19, 015005. [Google Scholar] [CrossRef]
- Horak, W.; Szczęch, M. Numerical simulation and experimental validation of the critical pressure value in ferromagnetic fluid seals. IEEE Trans. Magn. 2017, 53, 4600605. [Google Scholar] [CrossRef]
- Wohlfarth, E.P. Ferromagnetic Materials; North-Holland Publishing Company: Amsterdam, The Netherlands, 1980. [Google Scholar]
- Bashtovoy, V.G.; Berkovsky, B.M.; Vislovich, A.N. Introduction to Thermomechanics of Magnetic Fluids; Institute for High Temperatures: Moscov, Russia, 1988. [Google Scholar]
- Odenbach, S. Magnetic fluids-suspensions of magnetic dipoles and their magnetic control. J. Phys. Condens. Matter 2003, 15, 1497–1508. [Google Scholar] [CrossRef]
- Ryapolov, P.; Vasilyeva, A.; Kalyuzhnaya, D.; Churaev, A.; Sokolov, E.; Shel’deshova, E. Magnetic fluids: The interaction between the microstructure, macroscopic properties, and dynamics under different combinations of external influences. Nanomaterials 2024, 14, 222. [Google Scholar] [CrossRef]
- Anton, I.; Vekas, L.; Potencz, I.; Suciu, E. Ferrofluid flow under the influence of rotating magnetic fields. IEEE Trans. Magn. 1980, 16, 283–287. [Google Scholar] [CrossRef]
- Rosensweig, R.E. Ferrohydrodynamic; Cambridge University Press: Cambridge, UK, 1985. [Google Scholar]
- Mailfert, L.; Martinet, A. Flow regimes for a magnetic suspension under a rotating magnetic field. J. Phisique 1973, 34, 197–201. [Google Scholar] [CrossRef]
- Moskowitz, R.; Rosensweig, R.E. Nonmechanical torque-driven flow of a ferromagnetic fluid by an electromagnetic field. Appl. Phys. Lett. 1967, 11, 301–303. [Google Scholar] [CrossRef]
- Lorenz, C.; Zahn, M. Hele-shaw ferrohydrodynamics for rotating and dc axial magnetic fields. Phys. Fluids 2003, 15, S4. [Google Scholar] [CrossRef]
- Rhodes, S.; He, X.; Elborai, S.; Lee, S.H.; Zahn, M. Magnetic fluid behavior in uniform DC, AC, and rotating magnetic fields. J. Electrost. 2006, 64, 513–519. [Google Scholar] [CrossRef]
- Rosenthal, A.D.; Rinaldi, C.; Franklin, T.; Zahn, M. Torque measurements in spin-up flow of ferrofluids. J. Fluids Eng. Trans. ASME 2004, 126, 196–205. [Google Scholar] [CrossRef]
- ISO 3310-1:2016; Test Sieves—Technical Requirements and Testing—Part 1: Test Sieves of Metal Wire Cloth. ISO Copyright Office: Geneva, Switzerland, 2016.
- Fertman, V.E. Magnetic Fluids Guidebook: Properties and Applications; Hemisphere Publishing Corporation: London, UK, 1990. [Google Scholar]
- Zschunke, F.; Rivas, R.; Brunn, P.O. Temperature behavior of magnetorheological fluids. Appl. Rheol. 2005, 15, 116–121. [Google Scholar] [CrossRef]
- Jansson, T.R.N.; Haspang, M.P.; Jensen, K.H.; Hersen, P.; Bohr, T. Polygons on a rotating fluid surface. Phys. Rev. Lett. 2006, 96, 174502. [Google Scholar] [CrossRef] [PubMed]
- Godfrey, D.A. A hexagonal feature around Saturn’s north pole. Icarus 1988, 76, 335–356. [Google Scholar] [CrossRef]
- Saric, W.S. Gortler vortices. Annu. Rev. Fluid Mech. 1994, 26, 379–409. [Google Scholar] [CrossRef]
- Floryan, J.M.; Saric, W. Stability of gortler vortices in boundary layers. AIAA J. 1982, 20, 316–323. [Google Scholar] [CrossRef]
- Whorlow, R.W. Rheological Techniques, 2nd ed.; Ellis Horwood Limited: Chichester, UK, 1992. [Google Scholar]
- Osiński, Z. Brakes and Clutches; Scientific Publishing House PWN: Warszawa, Poland, 2000. (In Polish) [Google Scholar]
- Kęsy, Z.; Kęsy, A. Performance assessment of new brake actuator with magneto–rheological working fluid. Int. Rev. Mech. Eng. 2007, 1, 691–696. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Fe Particle Size | Base Fluid |
|---|---|---|
| A | From 3.5 μm to 6.5 μm | Silicon oil OL.111 |
| B | From 100 μm to 150 μm | Silicon oil OL.111 |
| Symbol | Density [g/cm3] | Weight Concentration Ratio of Solid Particles φ [%] |
|---|---|---|
| 1 | 1.69 | 0.50 |
| 2 | 2.01 | 0.60 |
| 3 | 2.30 | 0.67 |
| 4 | 2.56 | 0.72 |
| 5 | 2.79 | 0.75 |
| Parameter | Value |
|---|---|
| Spindle radius RV-07 (7) | 2.1 mm |
| Internal radius of the tank opening | 3.25 mm |
| Maximum spindle immersion depth | 35 mm |
| Length of the electromagnet core | 276 mm |
| Cross-section of the electromagnet core | 24 mm × 12 mm |
| Wire diameter and number of turns of the electromagnet coil | 0.25 mm × 850 |
| Spindle angular velocity range | 2 rad/s–10 rad/s |
| MR fluid temperature during testing | 25 °C |
| Component | Designation | |
|---|---|---|
| Frequency converter | LG SV008iC5-1F (LS ELECTRIC Co., Ltd., Anyang-si, Republic of Korea) | |
| Engine stator | 230 V | 0.75 kW |
| Brake | MH1 | |
| Temperature sensor | NTC 215 | |
| Angular velocity meter | MeasureMe MT522 | |
| Torque gauge | MT1 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Musiałek, K.; Musiałek, I.; Osowski, K.; Olszak, A.; Mikulska, A.; Kęsy, Z.; Kęsy, A.; Choi, S.-B. A New Type of Hydraulic Clutch with Magnetorheological Fluid: Theory and Experiment. Micromachines 2024, 15, 572. https://0-doi-org.brum.beds.ac.uk/10.3390/mi15050572
Musiałek K, Musiałek I, Osowski K, Olszak A, Mikulska A, Kęsy Z, Kęsy A, Choi S-B. A New Type of Hydraulic Clutch with Magnetorheological Fluid: Theory and Experiment. Micromachines. 2024; 15(5):572. https://0-doi-org.brum.beds.ac.uk/10.3390/mi15050572
Chicago/Turabian StyleMusiałek, Karol, Ireneusz Musiałek, Karol Osowski, Artur Olszak, Aneta Mikulska, Zbigniew Kęsy, Andrzej Kęsy, and Seung-Bok Choi. 2024. "A New Type of Hydraulic Clutch with Magnetorheological Fluid: Theory and Experiment" Micromachines 15, no. 5: 572. https://0-doi-org.brum.beds.ac.uk/10.3390/mi15050572