4.3.1. Dean Number (De) Study
The Dean number, denoted as D
e, serves as a fundamental parameter in fluid dynamics, particularly in the context of flow through curved conduits like toroidal pipes. In our examination, we systematically varied the D
e across a range from 10 to 70. This variation allowed us to analyze a complex interaction of factors that significantly influence fluid behavior within toroidal configurations. At the heart of our investigation lies the profound impact of the D
e on several critical aspects of fluid dynamics. First and foremost, it determines the RTV profile of the fluid within the toroid. This tangential velocity, a key parameter in the case of our PIVG sensor, plays a crucial role in determining the angular velocity [
1,
2]. Moreover, the D
e shapes the toroid’s radial and axial flow profiles. Understanding how fluid moves in these directions is essential for optimizing toroidal designs in our PIVG application and for other contexts where precise fluid mixing, or efficient heat transfer is a priority. One of the most exciting outcomes of our study involved the development of secondary flows. By comprehensively exploring the Dean number’s role in shaping secondary flows, we gain insights into how to utilize or reduce its effects in practical settings. In the context of PIVG, measuring angular velocity hinges on obtaining accurate relative tangential velocity data inside the toroidal while minimizing the impact of secondary flows.
Before delving into the analysis of
Figure 6,
Figure 7 and
Figure 8, let us first define some of the key parameters that these graphs represent: D is the curvature diameter of the toroid, d is the cross-section diameter of the toroid, and δ is the ratio between the cross-section and curvature diameters.
Figure 6,
Figure 7 and
Figure 8 visually represent the RTV, radial, and axial contour within the toroidal pipe at different time steps of 2, 4, and 8 s. These contour maps illustrate the distribution of tangential velocity, radial, and radial velocity across the cross-section of the toroid. Red lines indicate areas with lower velocities, while blue lines signify regions with higher velocity due to the negative sign associated with velocity calculation. These maps showcase how the D
e, a key parameter in our study, influences the rotational flow patterns within the toroid.
At a lower Dean number (D
e = 11), the maximum relative tangential velocity (RTV) is observed at the center of the cross-section, indicating a uniform flow dominated by viscous forces at 2, 4, and 8 s (as shown in
Figure 6a,
Figure 7a and
Figure 8a). However, as the Dean number increases to 70, the RTV exhibits distinct behaviors over time intervals. At 2 s, and Dean number 70, the RTV peaks, forming an elliptical shape (as shown in
Figure 6a). Subsequently, at 4 s, the maximum velocity shifts towards the inner curvature of the toroid, indicating a transition in flow dynamics. Finally, at 8 s, the maximum velocity shifts towards the outer diameter of the toroidal curvature. This shift is attributed to the heightened influence of centrifugal forces at higher Dean numbers, which intensify the secondary flow and decelerate the RTV.
The observed changes in RTV behavior at different time intervals and De underscore the complexities of fluid dynamics within toroidal structures. Specifically, the shift in maximum velocity positions presents challenges for PIVG measurements, particularly at higher Dean numbers like 70. As the PIVG relies on capturing primary flow dynamics, alterations in RTV due to secondary flow effects can impact measurement accuracy. At Dean 70, where the RTV position shifts, it becomes challenging to precisely capture these changes using the camera, highlighting the importance of understanding and controlling secondary flow phenomena for accurate PIVG operation.
The radial contours are depicted in
Figure 6b,
Figure 7b and
Figure 8b for 2, 4, and 8 s, respectively, while the axial contours are illustrated in
Figure 6c,
Figure 7c and
Figure 8c at 2, 4, and 8 s. The radial flow, representing the cross-sectional fluid movement, exhibits an elliptic dimple pattern with a central vortex, which is indicative of this secondary flow. Concurrently, the axial flow, which is parallel to the rotation axis, exhibits four distinct vortices, two near the inner wall and two near the outer wall. Notably, the flow pattern at D
e 11 demonstrates a higher degree of uniformity compared to D
e 70; this is crucial factor for ensuring consistent and predictable fluid behavior, particularly in systems like the PIVG. The results for other Dean numbers are provided in
Appendix A for further reference.
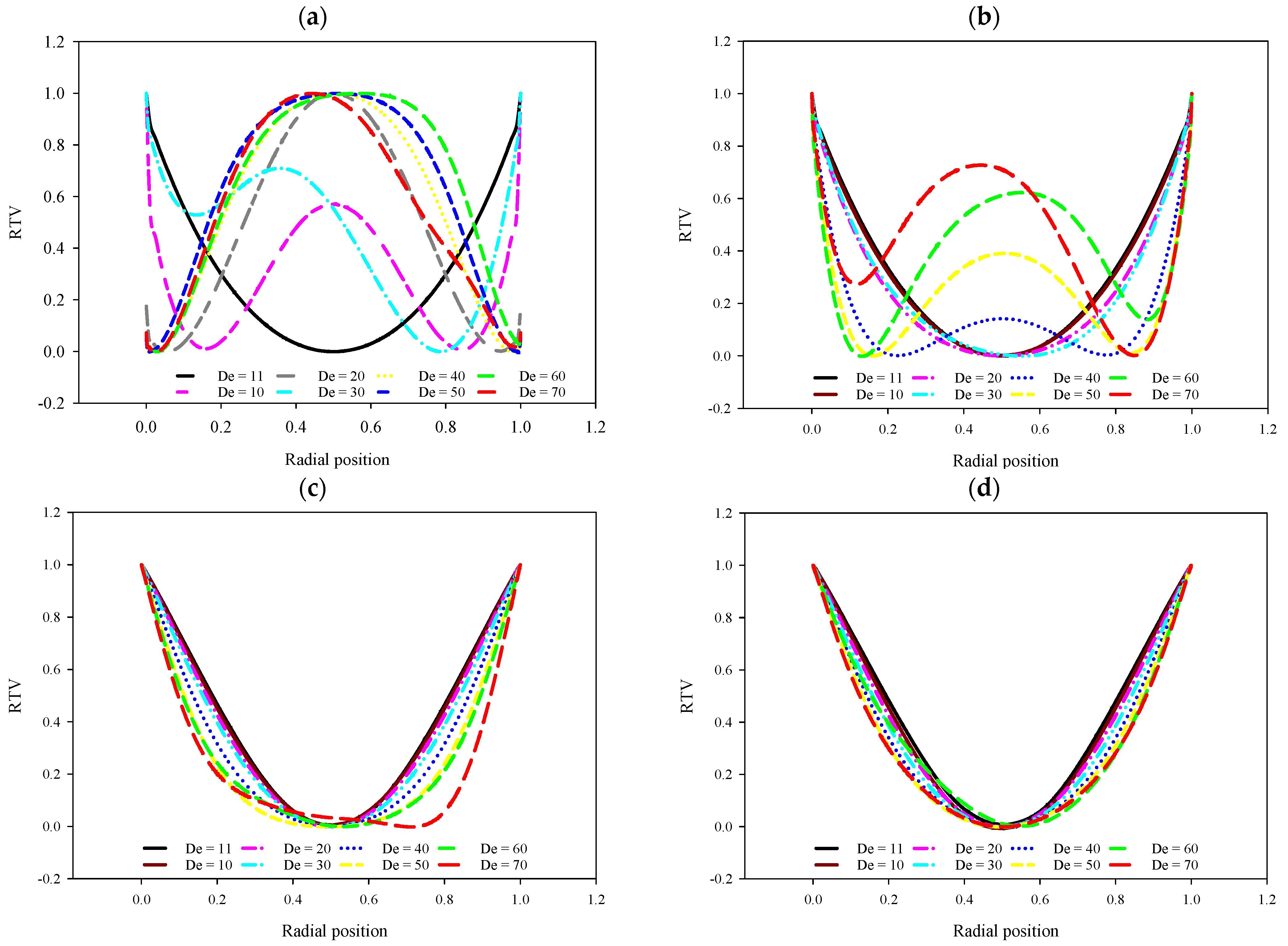
Figure 9 illustrates the RTV at different D
e over specific time intervals. The graphs are normalized, simplifying the comparison of trends across different Dean numbers. At 2 s, the fluid appears notably unstable, forming a parabolic shape only at
, suggesting a specific stability threshold at this early stage. Moving to 4 s,
, 20, and 30, exhibiting stability and forming parabola shapes which are indicative of potential full development, while the other Dean numbers do not follow this pattern. By 6 s, all the Dean numbers, except for 70, demonstrate stability, suggesting a transition to a more consistent flow pattern. Finally, at 8 s, all the Dean numbers stabilize and form parabolic shapes, indicating a fully developed and stable flow regime—characterized by consistent and predictable behavior over time, without sudden fluctuations.
In addition, it is noteworthy that at all time intervals, the D
e of 11 consistently exhibits a uniform and predictable profile, aligning closely with the input velocity shown in
Figure 4. This stability ensures that the PIVG measurement can accurately capture the angular velocity at each time step. In contrast, higher Dean numbers exhibit fluctuations, resulting in less reliable measurements and potentially compromising the accuracy of the PIVG system. This highlights the significance of selecting an optimal Dean number, such as 11, to ensure consistent and reliable performance in capturing fluid dynamics within the toroidal pipe.
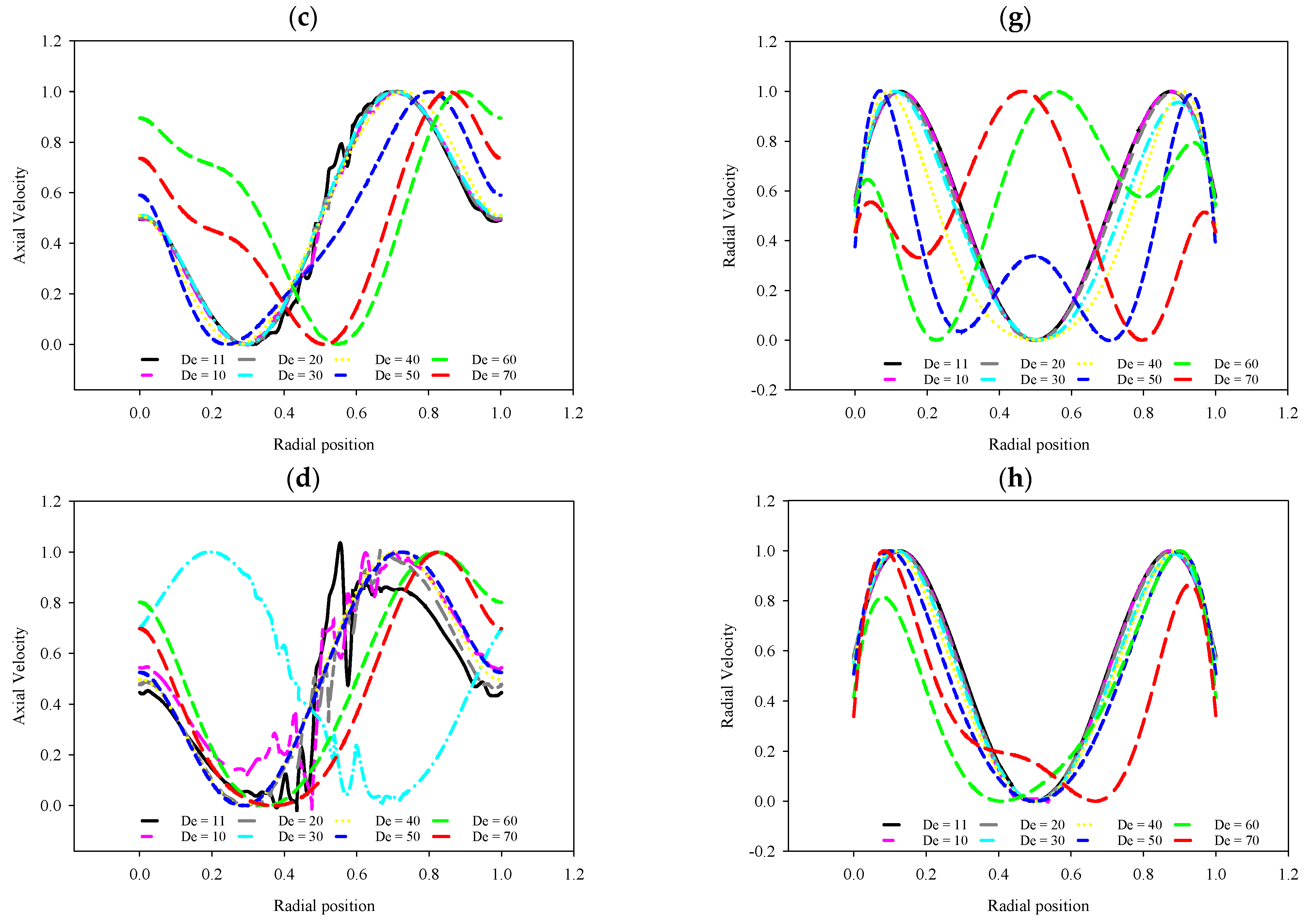
The normalized axial and radial velocity profiles are shown in
Figure 10, which highlights the complex secondary flow patterns within the toroidal pipe at various Dean numbers. As mentioned, normalization enhances comparability, allowing a detailed analysis of these patterns. The axial velocity profile showcases consistent flow patterns at lower Dean numbers, resembling sinusoidal trends. This sinusoidal behavior signifies stable fluid movement along the toroid’s length. However, as the Dean numbers increase, especially around 70, the sinusoidal pattern becomes more frequent, indicating a higher number of oscillations within a given time frame. This increase in frequency implies intensified oscillatory behavior in the fluid’s axial and radial movements. Similarly, the radial velocity profiles, exhibit sinusoidal trends at lower Dean numbers, indicating predictable radial fluid movements. Yet, at higher Dean numbers, particularly around 70, the sinusoidal pattern becomes more rapid, signifying a higher frequency of radial oscillations. This observation emphasizes the complex fluid dynamics that accompany higher Dean numbers, leading to rapid and complex movements. Understanding these complications is crucial when researching secondary flows in many engineering contexts.
4.3.2. Optimal Fluid Dynamics at De = 11 for PIVG Operation
In this part, we consider the vital decision regarding selecting a De of 11 for the PIVG system. Our purpose is to illuminate the dependability and uniformity of fluid flow phenomena under these specific circumstances and to provide useful thoughts about the design and operation.
In this section of results, attention is directed towards the optimization of the PIVG system, with a specific emphasis on the most pertinent Dean number, De = 11. This choice is pivotal for ensuring the ideal conditions for PIVG functionality and marks a crucial step towards enhancing the reliability and precision of the PIVG sensor. Additionally, it is important to note that the results presented in this section are not normalized, and they allow a clear distinction between the values of the primary and secondary flow.
In this 3D (
Figure 11) graph the exponential increase in velocity until 4.5 s, followed by an exponential decrease until the end, confirms the correlation between the velocity distribution and the input angular acceleration rate. These findings further support the consistency between the numerical simulation and the expected behavior of the fluid flow inside the toroidal system. The stability is vital for the PIVG sensor’s accurate operation; regardless of the PIV’s position, it will yield consistent results. Furthermore, this finding underscores the suitability of the toroidal dimensions and fluid behavior for integration into the PIVG system.
The secondary flow at the D
e = 11 is shown here, and the velocity vector field on the radial cross-section of the toroidal pipe is displayed, offering insights into flow dynamics at different time steps, as shown in
Figure 12. Velocity vectors intensify until 4 s, reflecting the toroidal system’s increasing angular velocity. A transformation occurs from 6 to 8 s; while the counter vortices are always present at all times, their intensity notably increases between 6 and 8 s. This evolution from outwards to inwards aligns with Dean’s curved pipe study [
4,
6,
20], underlining the enduring relevance of his insights. Additionally, in
Figure 13, the temporal evolution of the secondary flow (SF) at time intervals measured at radial positions r = 0 (center), r = 1, and r = 2 within the toroidal pipe is illustrated. Clearly, for all three radial positions, the secondary flow exhibits a consistent pattern of gradual augmentation from 2 to 4 s, culminating in a prominent peak at the 4 s mark. This peak is observed both at the center (r = 0) and progressively towards the outer radial positions (r = 1 and r = 2), accentuating the synchronized nature of this phenomenon across the toroidal pipe’s cross-section. Beyond this peak, the secondary flow gradually decreases at 6 and 8 s, indicating a consistent behavior across various radial positions.
The graph (
Figure 14) presents a comparative visualization of two crucial flow aspects within a toroidal system: secondary flow and RTV. Remarkably, it is discernible that the secondary flow exhibits notably weaker intensity in contrast to the comparatively more dominant RTV. The noticeable difference in strength implies that the secondary flow can be disregarded, especially when using particle image velocimetry (PIV) to measure RTV, which is crucial for the function of the PIVG. The reduced impact of the secondary flow allows a simplified measurement process (i.e., u = v = 0). This simplification enables a direct and precise determination of fluid velocity specifically in the direction of relative tangential motion, rather than measuring in three dimensions using PIV techniques.
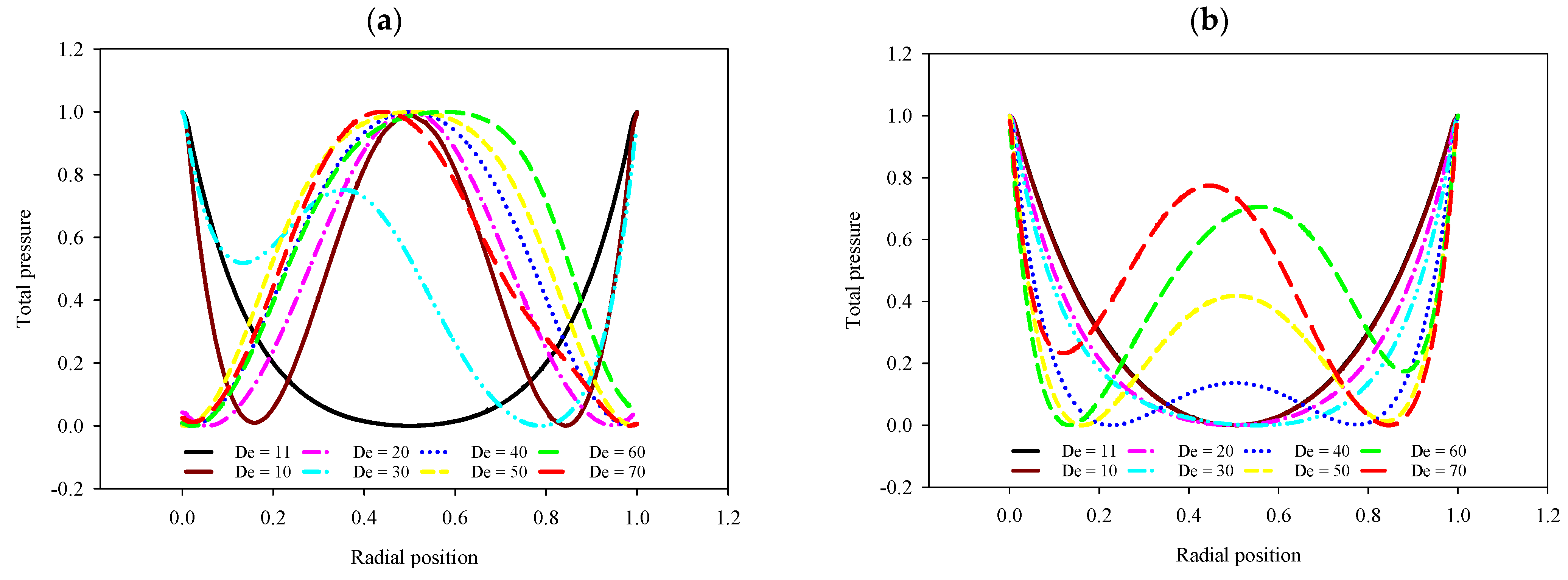
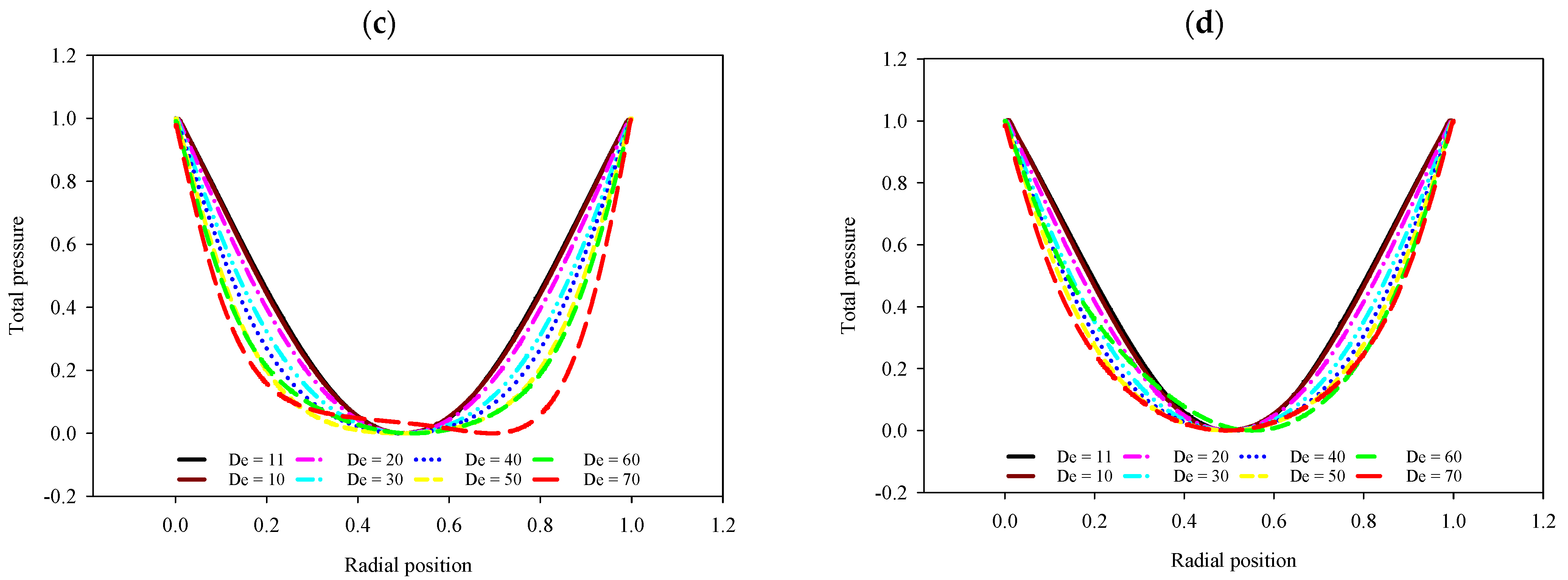
The examination of pressure along the curvature of the toroidal geometry in
Figure 15 offers valuable insights into the fluid dynamics within the PIVG system. By measuring pressure at various angles along the curvature, we gain an understanding of how centrifugal forces are distributed within the toroidal vessel. The consistent pattern observed in the pressure gradient graph, with the gradient remaining close to zero across different angles, indicates a balanced distribution of centrifugal forces. This balance is attributed to the uniform curvature of the toroidal cross-section, which ensures consistent fluid behavior regardless of the angle of measurement. Importantly, the near-zero pressure gradient (∂P/∂ϕ = 0) signifies a stable fluid flow pattern, which is crucial for accurate and reliable performance of the PIVG. Understanding the pressure distribution along the toroidal curvature helps optimize the design of the PIVG system, ensuring uniform fluid behavior and minimizing disturbances that could affect angular velocity measurements.
From the CFD results, it can be inferred that the mathematical model, represented by the Navier–Stokes equation, for the PIVG sensor provides a wide domain of validity with high fidelity. However, ensuring that the fluid behavior aligns with the prescribed limits, particularly in terms of laminar flow with a low Dean number, is crucial for optimal PIVG performance. After analyzing a range of Dean numbers from 10 to 70, our study identified a De of 11 as optimal for achieving favorable fluid dynamics within the toroidal vessel. This finding has significant implications for the design of the toroidal geometry, as we pinpointed ideal dimensions characterized by a curvature radius of 25 mm and a cross-sectional diameter of 5 mm. These dimensions were found to promote stable and well-developed fluid flow patterns, which are particularly suitable for PIVG operation. With these dimensions identified, we can tailor the packaging of the gyroscope to ensure optimal performance and functionality, offering valuable guidance for decision making in the design and implementation of PIVG systems, thereby enhancing their effectiveness in inertial navigation applications.





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}


