
Evaluation of the Dynamic Amplification Factors of a Monorail Tourism Transit System Based on Probability Statistics

Abstract
:1. Introduction
2. Vehicle–Bridge Coupling Model Based on the Finite Element Method
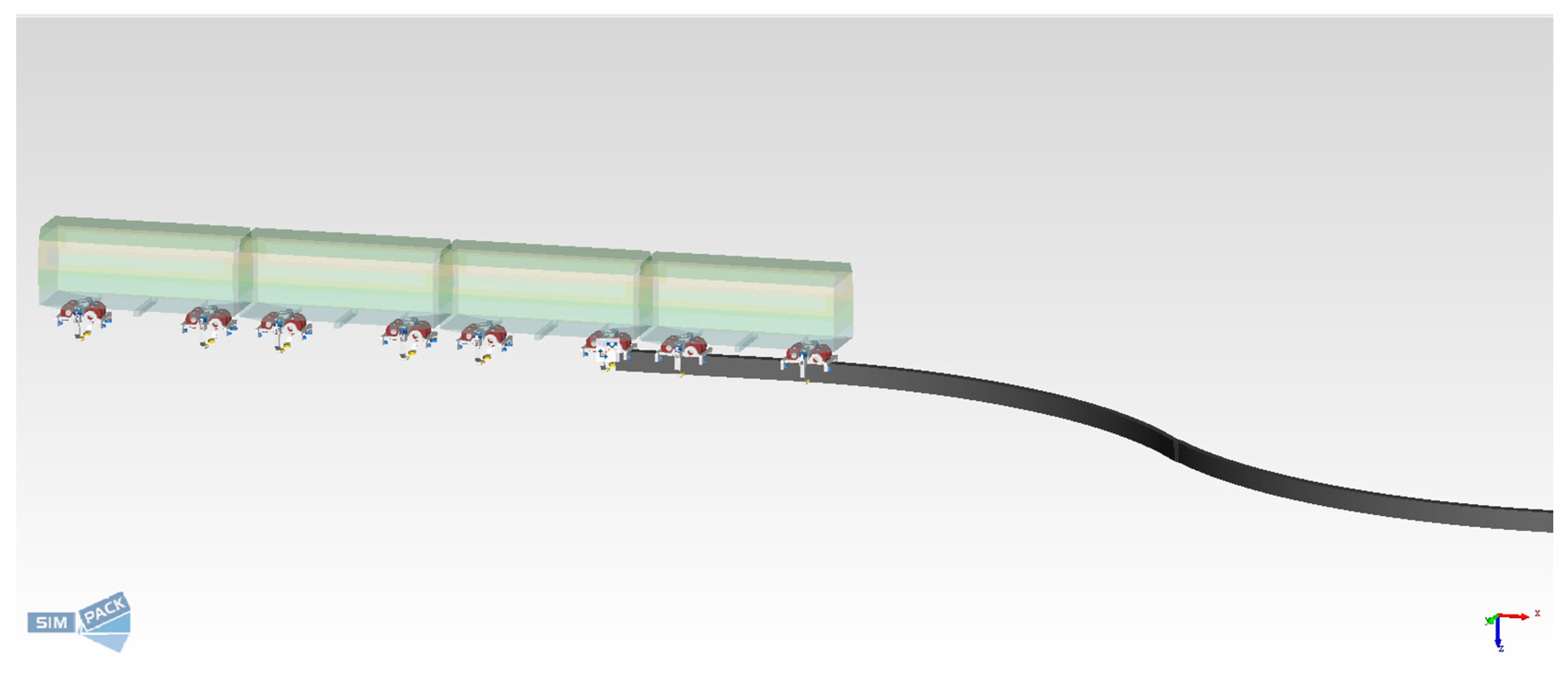
2.1. Establishment of Vehicle–Bridge Coupling Model
2.2. Track Irregularity Spectrum
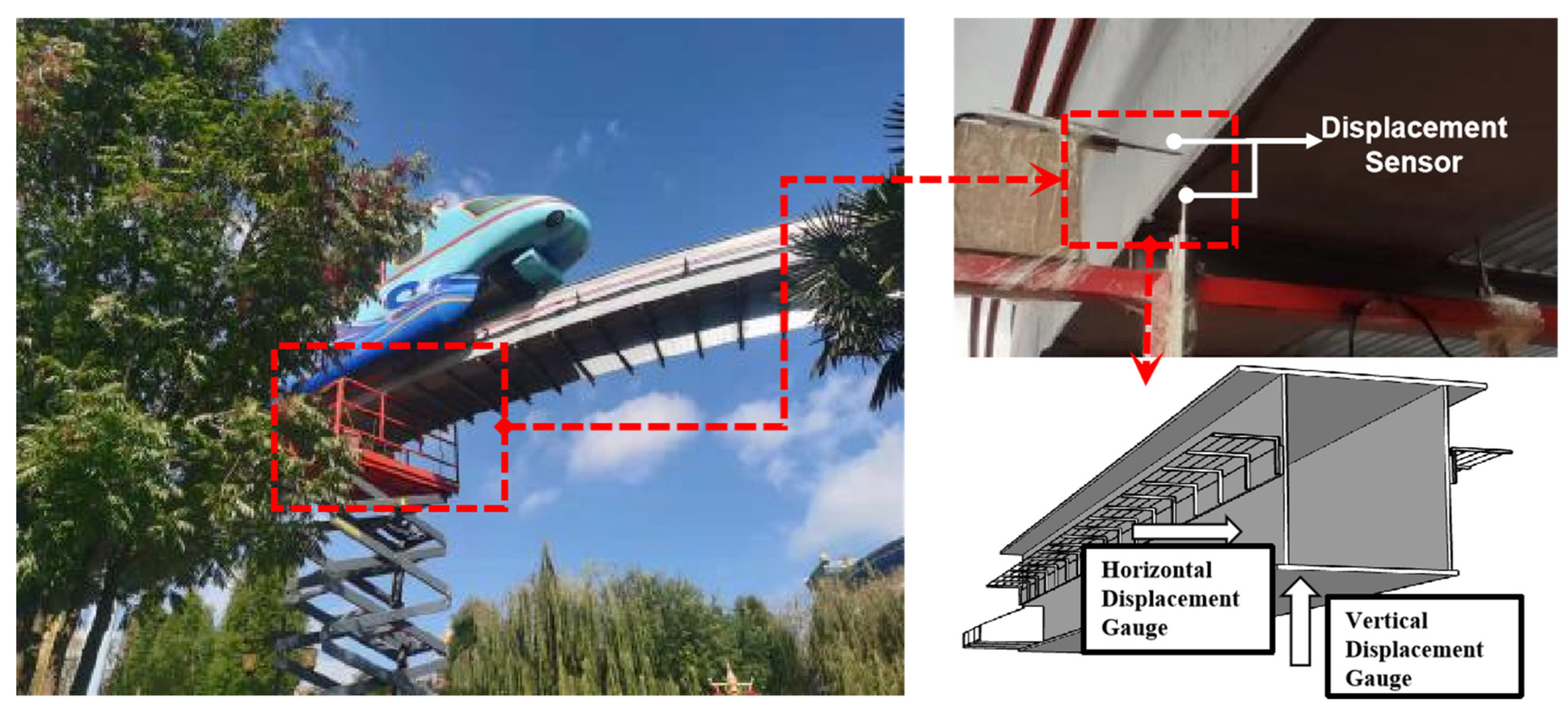
2.3. Model Validation Based on Real Measurements
3. Dynamic Amplification Factors of MTTS
3.1. Calculation Conditions
3.2. Analysis of Dynamic Amplification Factors Based on Probabilistic Hypothesis Testing
- Determine the sample statistics: The dynamic amplification factors sample is denoted as , and its mean and variance are calculated.
- The empirical distribution function can be used to estimate the distribution function of the population. The sample observations are determined and sorted from smallest to largest, and the frequency is calculated to obtain the empirical distribution function as shown in Equation (1):
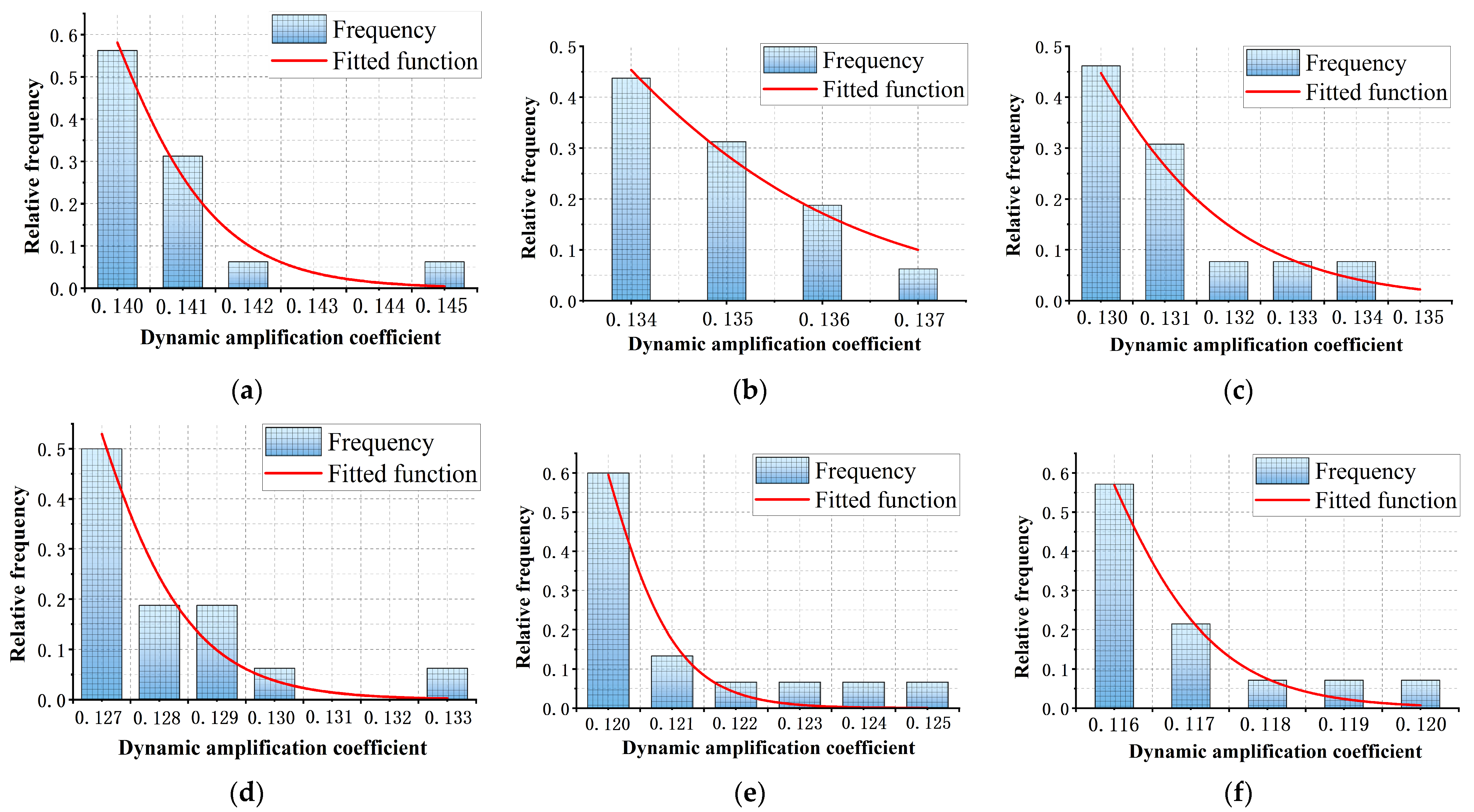
- Generate a histogram: The histogram can be used to estimate the probability density function of the population. The sample observations are grouped, and the frequency of each group is calculated. The group frequency is then divided by the respective sample size to obtain the group frequency . Using the group interval as the width and the ratio of the group frequency and the group interval as the height, a histogram can be drawn to estimate the density function curve of X.
- Determine the distribution function: Common probability distribution functions include the normal distribution, exponential distribution, Poisson distribution, and lognormal distribution, among others. The dynamic amplification factors generally follow an exponential distribution. After multiple function fittings, this paper confirms that the extreme type I confidence level of the exponential distribution provides the best fit, with its distribution function and probability density function shown in Equations (2) and (3), where A and B are the parameters.
- Parameter estimation: Common methods for parameter estimation include the method of moments and the maximum likelihood estimation. For parameters A and B of the aforementioned extreme type I distribution, the method of moments can be employed to obtain the following estimators:
- 6.
- Hypothesis testing for fitting the distribution function: Assuming that the sample follows the type I extreme value distribution , a test statistic T is established, and the K-S test: is used in this paper with a significance level of 0.05. The rejection region W is determined based on T, and the observed value t of the test statistic is calculated from the sample observation and compared with the critical value of the rejection region.
3.3. Influences of Different Spans and Speeds on Dynamic Amplification Factors


3.4. Consideration of Multi-Factors in the Expression of Dynamic Amplification Factors
3.5. Comparative Analysis of Dynamic Amplification Factors
4. Conclusions
- (1)
- A coupled model of a suspended monorail elevated tourist vehicle and bridge was established based on the finite element analysis software ANSYS and the multibody dynamics software SIMPACK. The six-level spectrum evaluation system of the monorail top plate irregularity spectrum was selected as the external excitation. The theoretically calculated values were compared with the measured displacement time history, with a maximum theoretically calculated displacement error of 1.32% at the mid-span of the beam, demonstrating that the simulation model based on the six-level spectrum has high accuracy and can correctly reflect the mechanical performance of the actual structure.
- (2)
- Sample values of the dynamic amplification factors were obtained based on the vehicle–bridge coupled simulation model. Combined with probability and mathematical statistical methods, a continuous random variable probability model was used to study the regularity of the dynamic amplification factor samples. After the K-S test, it was proven that the probability distribution characteristics of the dynamic amplification factors based on the span all followed the extreme value type I distribution.
- (3)
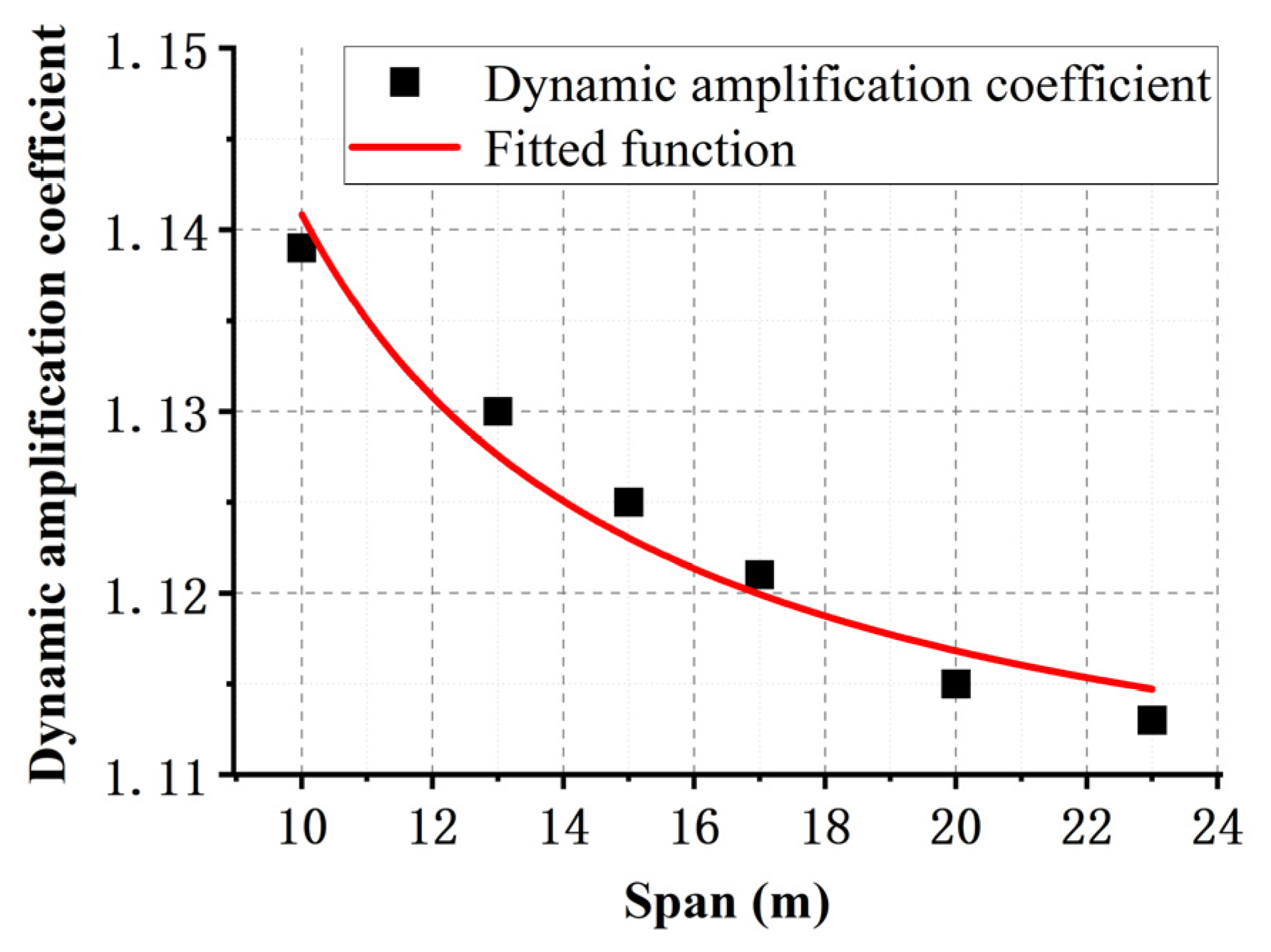
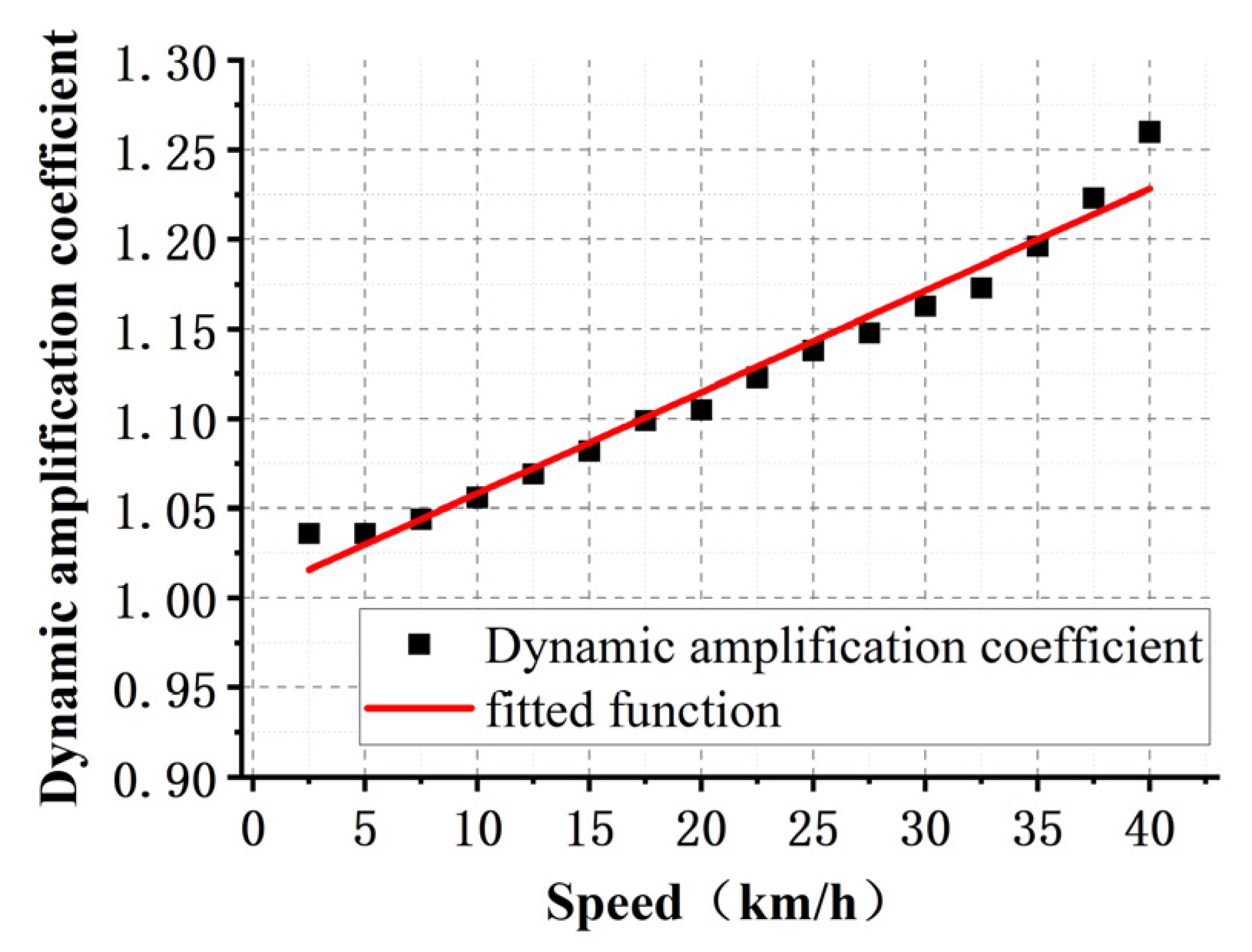
- For the extreme value type I distribution function of the dynamic amplification factors mentioned above, expressions for the dynamic amplification factors based on the span and vehicle speed as independent variables were derived through 95% confidence testing and function fitting methods. The changing trend of the dynamic amplification factors based on the span and vehicle speed for the monorail transit system was summarised.
- (4)
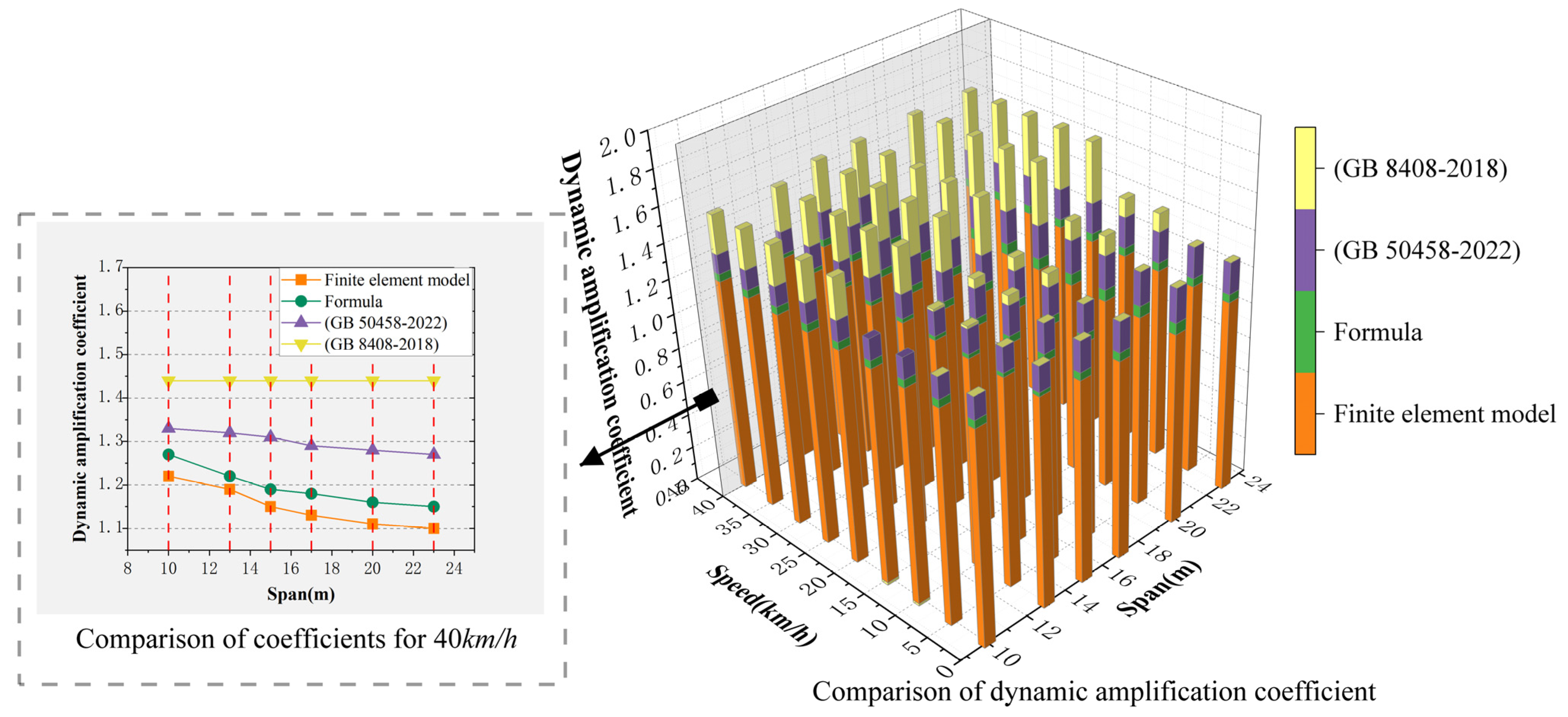
- Through 95% confidence testing, function fitting methods, and the relationships among the dynamic amplification factors, span, and vehicle speed, a multi-factor dynamic amplification factor calculation fitting formula considering vehicle speed, span, and irregularity was derived. A comparison of the fitting formula, finite element model, and calculations based on the “Standard for design of straddle monorail transit” and the “Large-scale amusement device safety code” was conducted, demonstrating that the formula has strong applicability and is suitable for the suspended monorail tourist transit system with slower speeds, enhancing economy while ensuring safety and providing technical support for the subsequent research and design of the system.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Mabrouk, B.; Adam, W. Development of Mathmetical Model for Monorail Suspension System under Different Track Conditions. Master’s Thesis, Universiti Tun Hussein Onn Malaysia, Batu Pahat, Malaysia, 2015; pp. 8–10. [Google Scholar]
- Wang, Z.; Li, F.; Niu, Y. Development and application prospect of straddled-type monorail. Elec. Locomot. Mass Transit Veh. 2018, 41, 8–13. [Google Scholar]
- Zhang, T. APM and Monorail for Urban Applications. In Proceedings of the 15th International Conference on Automated People Movers and Automated Transit Systems, Toronto, ON, Canada, 17–20 April 2016. [Google Scholar]
- He, X. Application and prospect of straddle monorail transit system in china. Urban Rail Transit 2015, 1, 26–34. [Google Scholar] [CrossRef]
- Guo, F.; Chen, K.; Gu, F.; Wang, H.; Wen, T. Reviews on current situation and development of straddle-type monorail tour transit system in China. J. Cent. South Univ. (Sci. Technol.) 2021, 52, 4540–4551. [Google Scholar]
- Shu, T. The Research on Impact Factor Spectrum of Bridgesbased on Measured Ramdom Traffic Flow Data. Master’s Thesis, Chang’an University, Xi’an, China, 2014. [Google Scholar]
- Wang, L.; Jiang, P. Research on the computational method of vibration impact coefficient for the long-span bridge and its application in engineering. J. Vibro Eng. 2016, 18, 394–407. [Google Scholar]
- Cui, C.; Feng, F.; Meng, X.; Liu, X. Fatigue life assessment of intercity track viaduct based on vehicle–bridge coupled system. Mathematics 2022, 10, 1663. [Google Scholar] [CrossRef]
- Jiang, J. Study on stress impact factor of suspenders of Nielsen system arch bridge based on probability density evolution method. J. Railw. Sci. Eng. 2021, 18, 2350–2357. [Google Scholar]
- Yan, B.; Tian, J.; Huang, J. Fatigue characteristics of long-Span bridge-double block ballastless track system. Mathematics 2023, 11, 1792. [Google Scholar] [CrossRef]
- Li, J.; Cui, H.; Ma, Z.; Liu, H.; Hu, Y. Study of impact factor of arch bridge made with continuous composite concrete filled steel tube beams. Bridg. Struct. 2022, 18, 89–100. [Google Scholar] [CrossRef]
- Wang, P. Study on Dynamic Response of Monorail Rapid-Transit Tour System Based on Measured Longitudinal Irregularity. Master’s Thesis, Central South University, Changsha, China, 2021; pp. 11–52, 62–68. [Google Scholar]
- Deng, L.; Duan, L.; Zou, Q. Comparison of dynamic amplification factors calculated from bridge strain and deflection. Eng. Mech. 2018, 35, 126–135. [Google Scholar]
- Ji, Y. Study on the Irregularity of the Top Plate of Track Beams of Monorail Tour Transit System. Master’s Thesis, Central South University, Changsha, China, 2023; pp. 1–79. [Google Scholar]
- Guo, F.; Ji, Y.; Liao, Q.; Liu, B.; Li, C.; Wei, S.; Xiang, P. The limit of the lateral fundamental frequency and comfort analysis of a straddle-type monorail tour transit system. Appl. Sci. 2022, 12, 10434. [Google Scholar] [CrossRef]
- GB 8408-2018; Large-Scale Amusement Device Safety Code. State Administration of Work Supervision: Beijing, China, 2018.
- GB 50458-2022; Standard for Design of Straddle Monorail Transit. Ministry of Housing and Urban-Rural Development of the People’s Republic of China: Beijing, China, 2022.
- TB10002-2017; Code for Design on Railway Bridge and Culvert. National Railroad Administration: Beijing, China, 2017.
- Shen, R.; Guan, K.; Fang, K. Probability distribution of random variables of impact coefficient in numerical simulation of vehicle-bridge coupled vibration. Vib. Shock 2015, 34, 123–128. [Google Scholar]
- Wang, Y. Study on Dynamic Behavior of Bridge Considering Coupling Vibration of Train-Extradosed Cable-Stayed Bridge. Master’s Thesis, Lanzhou Jiaotong University, Lanzhou, China, 2020. [Google Scholar]
- Zhou, Z.; Wang, D.; Wang, R.; Zhang, P.; Zhang, M. Dynamic impact factor for steel-concrete composite l-girder bridge based on vehicle-bridge coupled vibrations. Earthq. Eng. Eng. Dyn. 2022, 42, 127–137. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Standards | Calculations | Significance of Symbols |
|---|---|---|
| Large-scale amusement device safety code (GB 8408-2018) [16] | v is velocity, the unit is km/h | |
| Standard for design of straddle monorail transit (GB 50458-2022) [17] | L is the span of a bridge | |
| Code for Design on Railway Bridge and Culvert (TB10002-2017) [18] | L is the span of a simply supported or continuous steel bridge superstructure. |
| Span/m | Irregularity Spectra | Speed /(km/h) | Speed Differential /(km/h) | Number of Cases |
|---|---|---|---|---|
| 10 | Spectrum 1~5 | 2.5~40 | 2.5 | 80 |
| 13 | Spectrum 1~5 | 2.5~40 | 2.5 | 80 |
| 15 | Spectrum 1~5 | 2.5~40 | 2.5 | 80 |
| 17 | Spectrum 1~5 | 2.5~40 | 2.5 | 80 |
| 20 | Spectrum 1~5 | 2.5~40 | 2.5 | 80 |
| 23 | Spectrum 1~5 | 2.5~40 | 2.5 | 80 |
| Span/m | Formula | Finite Element Model | Standard for Design of Straddle Monorail Transit (GB 50458-2022) | Large-Scale Amusement Device Safety Code (GB 8408-2018) |
|---|---|---|---|---|
| 10 | 1.263 | 1.236 | 1.33 | 1.44 |
| 13 | 1.253 | 1.213 | 1.32 | 1.44 |
| 15 | 1.247 | 1.196 | 1.31 | 1.44 |
| 17 | 1.242 | 1.187 | 1.29 | 1.44 |
| 20 | 1.235 | 1.183 | 1.28 | 1.44 |
| 23 | 1.228 | 1.178 | 1.27 | 1.44 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, F.; Li, C.; Liao, Q.; Yan, Y.; Wu, C.; Jiang, L. Evaluation of the Dynamic Amplification Factors of a Monorail Tourism Transit System Based on Probability Statistics. Mathematics 2024, 12, 1221. https://0-doi-org.brum.beds.ac.uk/10.3390/math12081221
Guo F, Li C, Liao Q, Yan Y, Wu C, Jiang L. Evaluation of the Dynamic Amplification Factors of a Monorail Tourism Transit System Based on Probability Statistics. Mathematics. 2024; 12(8):1221. https://0-doi-org.brum.beds.ac.uk/10.3390/math12081221
Chicago/Turabian StyleGuo, Fengqi, Chenjia Li, Qiaoyun Liao, Yongfeng Yan, Changxing Wu, and Liqiang Jiang. 2024. "Evaluation of the Dynamic Amplification Factors of a Monorail Tourism Transit System Based on Probability Statistics" Mathematics 12, no. 8: 1221. https://0-doi-org.brum.beds.ac.uk/10.3390/math12081221