
Energy Management in a Super-Tanker Powered by Solar, Wind, Hydrogen and Boil-Off Gas for Saving CO2 Emissions

Abstract
:1. Introduction
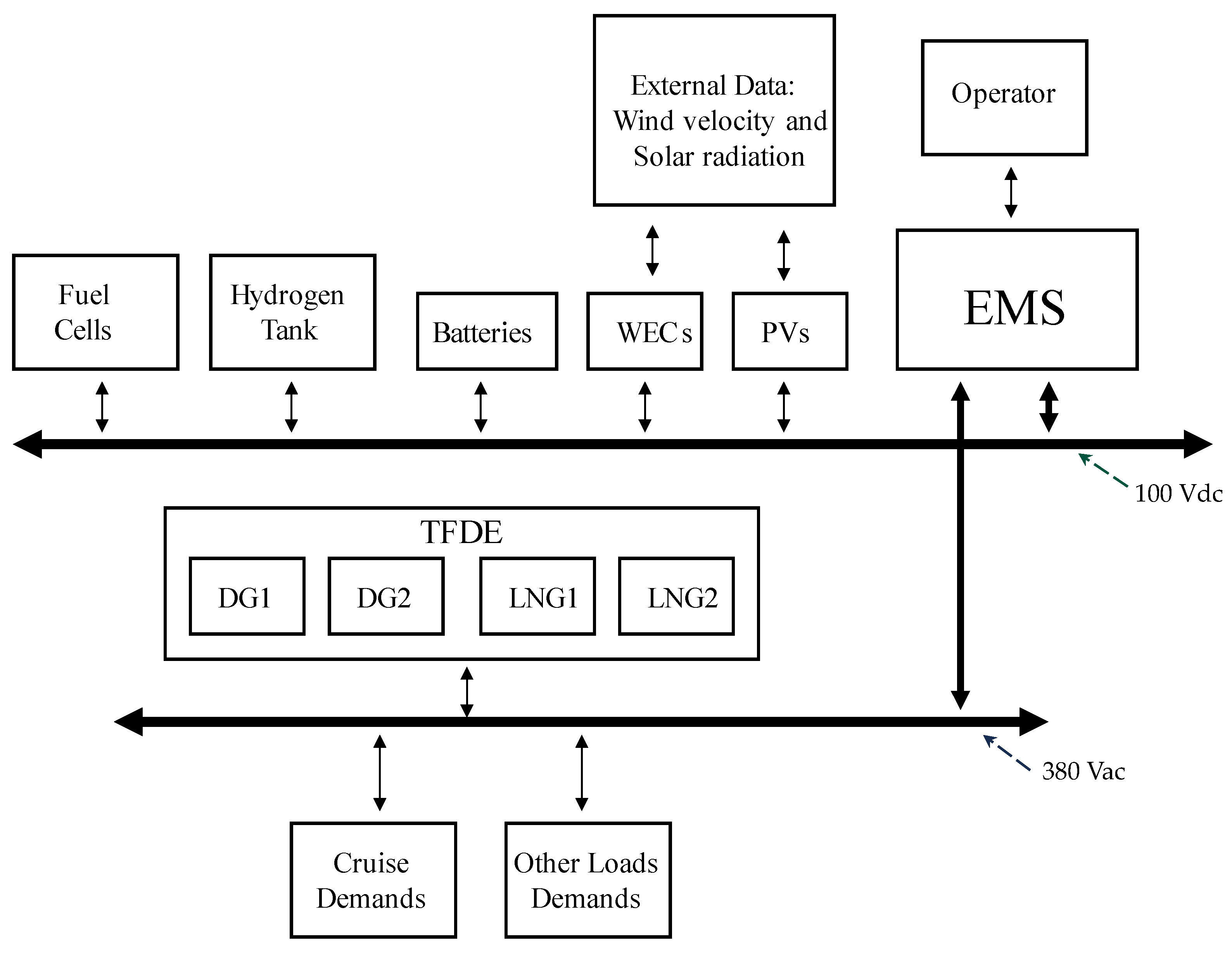
2. Ship Energy System
3. Energy Management Control System of the Ship
3.1. Definitions, Input and Output Variables
3.2. The Mathematical Model
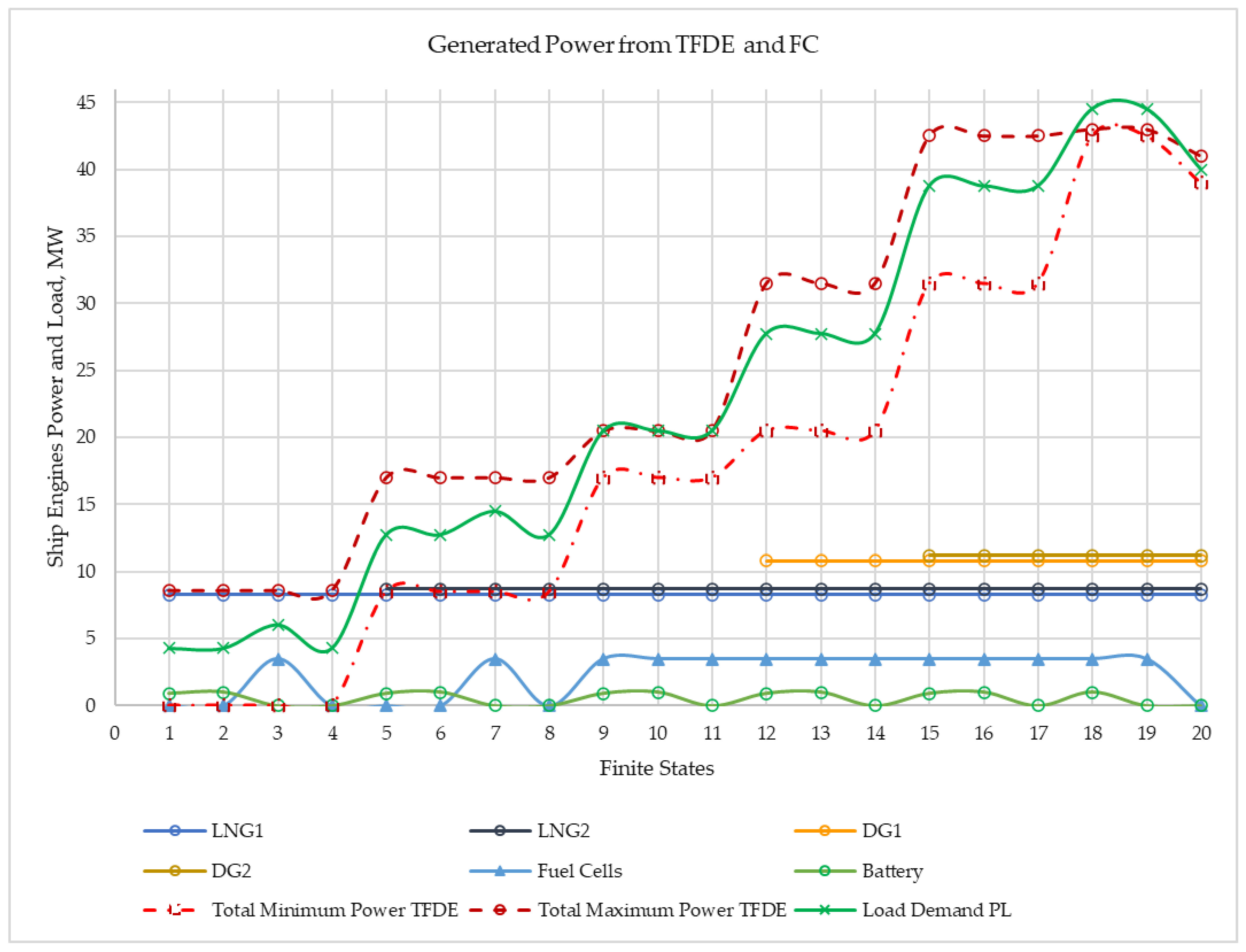
3.3. The Finite States and Transitions
- Observing the states of the generating units, the EMS assigns the ship’s power demands to the LNG1 generator as first priority.
- The EMS allocates the additional power requirements to the LNG1 and LNG2 generators.
- The EMS allocates the power requirements that overcome the two LNGs’ ratings to the FC generator.
- In a situation where power requirements exceed the capacity of LNG1, LNG2 and FC, the EMS directs the remaining load demand to the system’s diesel generators, DG1 and DG2. The activation by the EMS of DG1 and DG2 is the last priority for power coverage; due to the fuel used (MDO), they are the ship’s most polluting generators in terms of CO2 emissions.
3.4. Study Case of the LNG Cargo Tanker Energy Generation System
4. Cruise Scenarios
4.1. Scenario 1: Constant Cruise Conditions with Only the TFDE in MDO and BoG Mode, RE and FC Units Are Disabled
4.2. Scenario 2: Constant Cruise Conditions with TFDEs in MDO and BoG Mode, FC and RE Units Are Enabled
4.3. Scenario 3: Constant Cruise Conditions with TFDEs in BoG LNG Mode, FC and RE Units Are Enabled
4.4. Scenario 4: Constant Cruise Conditions with Internal Engines DG1, DG2 in MDO Mode and LNG in BoG Mode, RE Units Are Enabled
5. Discussion of Results
- (1)
- normal ship cruise using MDO- and BoG LNG-fueled TFDEs without FCs and without REs;
- (2)
- normal ship cruise using MDO- and BoG LNG-fueled engines and with H2 from FCs;
- (3)
- normal ship cruise with TFDEs using BoG LNG fuel with H2 from FCs; and
- (4)
- normal ship cruise using MDO and BoG LNG-fueled engines and generating units PVs and WECs, but without H2.
6. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Moriarty, P.; Honnery, D. Can renewable energy power the future? Energy Policy 2016, 93, 3–7. [Google Scholar] [CrossRef]
- Junlarkan, S.; Diewvilai, R.; Audomvongseree, K. Stochastic Modelling of Renewable Energy Sources for Capacity Credit Evaluation. Energies 2022, 15, 5103. [Google Scholar] [CrossRef]
- Papazis, S.A.; Ioannides, M.G.; Fotilas, P.N. An information system for the multiple criteria assessment of renewable energy power plants. Wind. Eng. 2000, 24, 81–99. [Google Scholar] [CrossRef]
- Verbruggen, A.; Fischedick, M.; Moomaw, W.; Weir, T.; Nadai, A.; Nilsson, L.; Nyboer, J.; Sathaye, J. Renewal energy costs, potentials, barriers: Conceptual Issues. Energy Policy 2010, 38, 850–861. [Google Scholar] [CrossRef]
- York, R.; Bell, S.E. Energy transitions or additions? Why a transition from fossil fuels requires more than the growth of renewable energy. Energy Res. Soc. Sci. 2019, 51, 40–43. [Google Scholar] [CrossRef]
- Papazis, S.A. Integrated Economic Optimization of Hybrid Thermosolar Concentrating System Based on Exact Mathematical Method. Energies 2022, 15, 7019. [Google Scholar] [CrossRef]
- Liu, M.; Wu, D. A new fresh water generation system under high vacuum degrees intensified by LNG cryogenic energy. Energy Procedia 2019, 158, 726–732. [Google Scholar] [CrossRef]
- Arefin, A.; Nabi, N.; Akram, W.; Islam, M.T.; Chowdhury, W. A Review of Liquefied Natural Gas as Fuels for Fuel Engines: Opportunities, Challenges and Responses. Energies 2020, 13, 6127. [Google Scholar] [CrossRef]
- Frantzis, C.; Zannis, T.; Savva, P.G.; Yfantis, E.A. A Review on Experimental Studies Investigating the Effect of Hydrogen Supplementation in CI Diesel Engines—The Case of HYMAR. Energies 2022, 15, 5709. [Google Scholar] [CrossRef]
- Stamatakis, M.E.; Ioannides, M.G. State Transitions Logical Design for Hybrid Energy Generation with Renewable Energy Sources in LNG Ship. Energies 2021, 14, 7803. [Google Scholar] [CrossRef]
- Yuan, Y.; Wang, J.; Yan, X.; Li, Q.; Long, T. A Design and Experimental investigation of a large-scale solar energy/diesel generator powered hybrid ship. Energy 2018, 165, 965–978. [Google Scholar] [CrossRef]
- Yigit, K.; Acarkan, B. A new electrical energy management approach for ships using mixed energy sources to ensure sustainable port cities. Sustain. Cities Soc. 2018, 40, 126–135. [Google Scholar] [CrossRef]
- Zhao, R.; Xu, L.; Su, X.; Feng, S.; Li, C.; Tan, Q.; Wang, Z. A numerical Experimental Study of Marine Hydrogen-Natural Gas-Diesel Tri Fuel Engines. Pol. Marit. Res. 2020, 27, 80–90. [Google Scholar] [CrossRef]
- Edwards, P.P.; Kuznetsov, V.L.; David, W.I.F. Hydrogen Energy. Philos. Trans. R. Soc. A. 2007, 365, 1043–1056. [Google Scholar] [CrossRef] [PubMed]
- Gregoire Padro, C.E.; Lau, F. Advances in Hydrogen Energy; Springer: New York, NY, USA, 31 July 2000; ISBN 978-0-306-46429-4. [Google Scholar] [CrossRef]
- Weiming, L.; Jiekang, W.; Jinjian, C.; Yunshou, M.; Shengyu, C. Capacity Allocation Optimization Framework for Hydrogen Integrated Energy System Considering Hydrogen Trading and Long-Term Hydrogen Storage. IEEE Access 2023, 11, 15772–15787. [Google Scholar] [CrossRef]
- Crimes, C.A.; Varghess, O.K.; Ranjan, S. Light, Water, Hydrogen: The Solar Generation of Hydrogen by Water Photoelectrolysis; Springer Science & Business Media LLC: New York, NY, USA, 2008; ISBN 978-0-387-33198-0. [Google Scholar]
- Buttner, W.J.; Post, M.B.; Burgess, R.; Rivkin, C. An overview of Hydrogen Safety Sensors and Requirements. Int. J. Hydrog. Energy 2011, 36, 2462–2470. [Google Scholar] [CrossRef]
- Garland, N.L.; Papageorgopoulos, D.C.; Stanford, J.M. Hydrogen and fuel cell technology: Progress, challenges, and future directions. Energy Procedia 2012, 28, 2–11. [Google Scholar] [CrossRef]
- Maheshwari, K.; Sharma, S.; Sharma, A.; Vermna, S. Fuel Cell and Its Applications: A Review. Int. J. Eng. Res. Technol. (IJERT) 2018, 7, 6. [Google Scholar]
- Larminie, J.; Dicks, A. Fuell Cell Systems Explained, 2nd ed.; Wiley: Hoboken, NJ, USA, 2013; ISBN 978-1-118-87833-0. [Google Scholar]
- Zhang, X.; Li, P.; Ren, J.; Feng, H.; Mal, C.; Hou, Z. Progress in the application of hydrogen fuel cells. E3S Web Conf. 2019, 118, 01058. [Google Scholar] [CrossRef]
- EG&G Technical Services, Inc. Fuel Cell Handbook, 7th ed.; U.S. Department of Energy, Office of Fossil Energy, National Energy Technology Laboratory: Morgantown, WV, USA, 2004. [Google Scholar]
- Shakeri, N.; Zadeh, M.; Bremnes Nielsen, J. Hydrogen Fuel Cells for Ship Electric Propulsion: Moving Toward Greener Ships. IEEE Electrif. Mag. 2020, 8, 27–43. [Google Scholar] [CrossRef]
- Zhang, Z.; Guan, C.; Liu, Z. Real-Time Optimization Energy Management Strategy for Fuel Cell Hybrid Ships Considering Power Sources Degradation. IEEE Access 2020, 8, 87046–87059. [Google Scholar] [CrossRef]
- International Maritime Organization IMO. Available online: https://www.imo.org/en/About/Conventions/Pages/COLREG.aspx (accessed on 3 March 2024).
- Wang, Z. Intelligent Dynamic Collision Avoidance Strategy of Hydrogen Fuel Cell Unmanned Ship via Improved Fusion Dynamic Window Method. IEEE Access 2023, 11, 69971–69988. [Google Scholar] [CrossRef]
- Tierielnyk, S.; Lukovtsev, V. Emergency Prevention Control as a Means of Power Quality Improvement in a Shipboard Hybrid Electric Power System. Energies 2024, 17, 398. [Google Scholar] [CrossRef]
- Babicz, J. Wärtsilä Encyclopedia of Ship Technology, 2nd ed.; Baobab Naval Consultancy: Helsinki, Finland, 2015. [Google Scholar]
- Lee, K.; Shin, D.; Yoo, D.; Choi, H.; Kim, H. Hybrid photovoltaic/diesel green ship operating in standalone and grid-connected mode–Experimental Investigation. Energy 2013, 49, 475–483. [Google Scholar] [CrossRef]
- Papazis, S.A.; Bakos, G.C. Generalized model of economic dispatch optimization as an educational tool for management of energy systems. Adv. Electr. Comput. Eng. 2021, 21, 2, 75–86. [Google Scholar] [CrossRef]
- Harrison, K.W.; Remick, R.; Martin, G.D.; Hoskin, A. Hydrogen Production: Fundamentals and Case Study Summaries; No. NREL/CP-550-47302; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2010. [Google Scholar]
- Jain, K.; Jain, K. Hydrogen Fuel Cell: A Review of different types of fuel Cells with Emphasis on PEM fuel cells and Catalysts used in the PEM fuel cell. Int. J. All Res. Educ. Sci. Methods 2021, 9, 1012–1025. [Google Scholar]
- Felseghi, R.; Carcadea, E.; Raboaca, M.; Trufin, C.; Filote, C. Hydrogen Fuel Cell Technology for the Sustainable Future of Stationary Applications. Energies 2019, 12, 4593. [Google Scholar] [CrossRef]
- Kalamaras, C.M.; Efstathiou, A.M. Hydrogen Production Technologies: Current State and Future Developments. Hindawi Publ. Corp. Conf. Pap. Energy 2013, 2013, 690627. [Google Scholar] [CrossRef]
- Ahmad Kamaroddin, M.F.; Sabli, N.; Tuan Abdullah, T.A.; Siajam, S.I.; Abdullah, L.C.; Abdul Jalil, A.; Ahmad, A. Membrane-Based Electrolysis for Hydrogen Production: A Review. Membranes 2021, 11, 810. [Google Scholar] [CrossRef]
- Riis, T.; Hagen, E.F.; Vie, P.J.S.; Ulleberg, Ø. Hydrogen Production and Storage; R&D Priorities and Gaps; OECD/IEA Publications: Paris, France, 2006; Available online: https://www.iea.org/reports/hydrogen-production-and-storage (accessed on 2 March 2024).
- El-Shafie, M.; Kambara, S.; Hayakawa, Y. Hydrogen Production Technologies Overview. J. Power Energy Eng. 2019, 7, 107–154. [Google Scholar] [CrossRef]
- Fuel Cell Consumption Online Calculator. Available online: https://marine-service-noord.com/en/products/alternative-fuels-and-technologies/hydrogen/how-much-hydrogen-do-i-need/ (accessed on 3 March 2024).
- Mathworks. Available online: https://uk.mathworks.com/help/physmod/sps/specialized-power-systems.html?s_tid=CRUX_lftnav (accessed on 15 December 2022).
- Ioannides, M.G.; Papadopoulos, P.J. Speed and power factor controller for AC adjustable speed drives. IEEE Trans. Energy Convers. 1991, 6, 469–475. [Google Scholar] [CrossRef]
- Ioannides, M.G.; Papazis, S.A.; Ioannidou, F.G. Implementation of scalar control scheme for variable frequency induction motor actuator system. Sens. Actuators A Phys. 2003, 106, 306–309. [Google Scholar] [CrossRef]
- Ducange, P.; Marcelloni, F.; Antonelli, M. A Novel Approach Based on Finite-State Machines with Fuzzy Transitions for Nonintrusive Home Appliance Monitoring. IEEE Trans. Ind. Inform. 2014, 10, 1185–1197. [Google Scholar] [CrossRef]
- Davis, J.; Reese, R.B. Finite State Machine Datapath Design, Optimization, and Implementation; Springer Nature: Cham, Switzerland, 2007. [Google Scholar] [CrossRef]
- Kapus-Kolar, M. Three Generalizations to a Generic Integrated Test Generation Method for Finite State Machines. Comput. J. 2009, 52, 599–625. [Google Scholar] [CrossRef]
- Ioannides, M.G. State space formulation and transient stability of the double output asynchronous generator. IEEE Trans. Energy Convers. 1993, 8, 732–738. [Google Scholar] [CrossRef] [PubMed]
- Vernados, P.G.; Katiniotis, I.M.; Ioannides, M.G. Development of an experimental investigation procedure on double fed electric machine-based actuator for wind power systems. Sens. Actuators A Phys. 2003, 106, 302–305. [Google Scholar] [CrossRef]
- Stamelos, A.P.; Papoutsidakis, A.; Vikentios, V.; Papazis, S.A.; Ioannides, M.G. Experimental Educational System of AC Electric Drives with Internet of Things. In Proceedings of the XXIII International Conference on Electrical Machines ICEM 2018, Alexandroupoli, Greece, 3–6 September 2018; pp. 1497–1502. [Google Scholar] [CrossRef]
- Ioannides, M.G.; Tegopoulos, J.A. Optimal Efficiency Slip-Power Recovery Drive. IEEE Trans. Energy Convers. 1988, 3, 342–348. [Google Scholar] [CrossRef] [PubMed]
- Ioannides, M.G.; Tuduce, R.; Cristea, P.-D.; Papazis, S.A. Wind power generating systems based on double output induction machine: Considerations about control techniques. In Proceedings of the 20th International Conference on Systems, Signals and Image Processing (IWSSIP 2013), Bucharest, Romania, 7–9 July 2013; pp. 103–107. [Google Scholar] [CrossRef]
- Ioannides, M.G.; Koukoutsis, E.B.; Stamelos, A.P.; Papazis, S.A.; Stamataki, E.E.; Papoutsidakis, A.; Vikentios, V.; Apostolakis, N.; Stamatakis, M.E. Design and operation of Internet of Things-based monitoring control system for induction machines. Energies 2023, 16, 3049. [Google Scholar] [CrossRef]
- Ioannides, M.G.; Stamelos, A.P.; Papazis, S.A.; Stamataki, E.E.; Stamatakis, M.E. Internet of Things-Based Control of Induction Machines: Specifics of Electric Drives and Wind Energy Conversion Systems. Energies 2024, 17, 645. [Google Scholar] [CrossRef]
- Zhu, Y.; Zhou, S.; Feng, Y.; Hu, Z.; Yuan, L. Influences of solar energy on the energy efficiency design index for new building ships. Int. J. Hydrog. Energy 2017, 42, 19389–19394. [Google Scholar] [CrossRef]
- 54Energy. Available online: https://54energy.net/collections/wind-energy (accessed on 3 March 2024).
- Electrolyzer. Available online: https://www.iberdrola.com/sustainability/electrolyzer (accessed on 3 March 2024).
- US Department of Energy, Hydrogen Program. Home | Hydrogen Program. Available online: https://www.hydrogen.energy.gov/home (accessed on 1 March 2024).
- Trainer, T. Some Problems in storing renewable energy. Energy Policy 2017, 110, 386–393. [Google Scholar] [CrossRef]
- Ioannides, M.G.; Stamelos, A.; Papazis, S.A.; Papoutsidakis, A.; Vikentios, V.; Apostolakis, N. IoT monitoring system for applications with renewable energy generation and electric drives. Renew. Energ. Power Qual. J. 2021, 19, 565–570. [Google Scholar] [CrossRef]
- Stamelos, A.P.; Papazis, S.A.; Papoutsidakis, A.; Ioannides, M.G.; Stamatakis, M.E.; Stamataki, E.E. Internet of Things-Based Control of Induction Machines. Encyclopedia 2024. Available online: https://encyclopedia.pub/entry/55117 (accessed on 29 February 2024).
- Solar Irradiance Calculations. 2023. Available online: https://re.jrc.ec.europa.eu/pvg_tools/en/tools.html (accessed on 30 June 2023).
- Inal, O.B.; Zincir, B.; Dere, C.; Charpentier, J.-F. Hydrogen Fuel Cell as an Electric Generator: A Case Study for a General Cargo Ship. J. Mar. Sci. Eng 2024, 12, 432. [Google Scholar] [CrossRef]
- Penga, J.; Vidović, T.; Radica, G.; Penga, Ž. Analysis of Hybrid Ship Machinery System with Proton Exchange Membrane Fuel Cells and Battery Pack. Appl. Sci. 2024, 14, 2878. [Google Scholar] [CrossRef]
- Gray, N.; McDonagh, S.; O’Shea, R.; Smyth, B.; Murphy, J.D. Decarbonizing ships, planes and trucks: An analysis of suitable low-carbon fuels for the maritime, aviation and haulage sector. Adv. Appl. Energy 2021, 1, 10008. [Google Scholar] [CrossRef]
- Handbook for Hydrogen-Fuelled Vessels. Available online: https://www.dnv.com/maritime/publications/handbook-forhydrogen-fuelled-vessels-download (accessed on 25 March 2024).
- Ngando Ebba, J.D.; Camara, M.B.; Doumbia, M.L.; Dakyo, B.; Song-Manguelle, J. Large-Scale Hydrogen Production Systems Using Marine Renewable Energies: State-of-the-Art. Energies 2024, 17, 130. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbols | Input Variables | Role in the System |
|---|---|---|
| PL | P_Demands | Power of ship load demands (W) |
| PPV | P_pv | Power provided by PV systems (W) |
| PW | P_wind | Power provided by wind generators (W) |
| Pd1 | P_diesel1_ret | Power provided by DG1 (TFDE) (W) |
| Pd2 | P_diesel2_ret | Power provided by DG2 (TFDE) (W) |
| Pg1 | P_gas3_ret | Power provided by LNG1 (TFDE) (W) |
| Pg2 | P_gas4_ret | Power provided by LNG2 (TFDE) (W) |
| PFC | P_fc5_ret | Power provided by fuel cell generator (W) |
| Pd1max | eng1_Pmax | Maximum power permitted for DG1 (TFDE) (W) |
| Pd2max | eng2_Pmax | Maximum power permitted for DG2 (TFDE) (W) |
| Pg1max | eng3_Pmax | Maximum power permitted for LNG1 (TFDE) (W) |
| Pg2max | eng4_Pmax | Maximum power permitted for LNG2 (TFDE) (W) |
| PFCmax | Eng5_Pmax | Maximum power permitted for fuel cell generator (W) |
| SoC | SOC | Batteries’ state of charge (0 < SoC < 1) |
| Symbols | Output Variables | Role in the System |
|---|---|---|
| EMSC | EMS_State | EMS control state |
| Pd1r | P_diesel1_req | Power required from DG1 (TFDE) (W) |
| Pd2r | P_diesel2_req | Power required from DG2 (TFDE) (W) |
| Pg3r | P_gas3_req | Power required from LNG1 (TFDE) (W) |
| Pg4r | P_gas4_req | Power required from LNG2 (TFDE) (W) |
| PFCr | P_fc5_req | Power required from fuel cells generator (W) |
| Pbr | Pcons | Power required from batteries discharged (W) |
| Pbc | Pch | Power offered for charging batteries (W) |
| Phydro | P_hydro | Power offered for hydrogen production (W) |
| PS | P_spare | System spare power (W) |
| Finite States | Conditions for Transitions between Finite States | Description of Finite States |
|---|---|---|
| 1 | LNG1 is activated. LNG2, DG1 and DG2 are deactivated. | |
| 0 < PL ≤ Pg1max Battery is enabled and SOC < 0.95 | EMS enters at this state when ship demands are less than power generated from LNG1 generator. Residual power from LNG1 is supplying the batteries charging. | |
| 2 | 0 < PL ≤ Pg1max Battery is enabled and SOC ≥ 0.95 | EMS enters at this state when ship demands are less than power generated from LNG1 generator. Residual power from LNG1 is considered spare (SOC ≥ 0.95). |
| 3 | 0 < PL ≤ Pg1max Battery is disabled. FC unit is enabled. | EMS enters at this state when ship demands are less than power generated from LNG1. Residual power from LNG1 is directed to the hydrogen production unit. The FC unit is enabled. |
| 4 | 0 < PL ≤ Pg1max Battery is disabled. FC unit is disabled. | EMS enters at this state when ship demands are less than power generated from LNG1. Residual power is considered spare. Batteries and FC unit are disabled. |
| 5 | LNG1 and LNG2 are activated. DG1 and DG2 are deactivated. | |
| Pg1max ≤ PL ≤ Pg1max + Pg2max Battery is enabled and SOC < 0.95 | EMS enters at this state when ship demands are less than power generated from LNG1 and LNG2 generators Residual power from LNG1 and LNG2 generators is supplying the batteries charging. | |
| 6 | Pg1max ≤ PL ≤ Pg1max + Pg2max Battery is enabled and SOC ≥ 0.95 | EMS enters at this state when ship demands are less than power generated from LNG1 and LNG2 generators. Residual power is considered to be spare (SOC ≥ 0.95) |
| 7 | Pg1max ≤ PL ≤ Pg1max + Pg2max Battery is disabled. FC is enabled. | EMS enters at this state when ship demands are less than power generated from LNG1 and LNG2 generators. Residual power is supplying the hydrogen production unit. FC unit is enabled. |
| 8 | Pg1max ≤ PL ≤ Pg1max + Pg2max Battery is disabled. FC is disabled. | EMS enters at this state when ship demands are less than power generated from LNG1 and LNG2. Residual power is considered spare. Batteries and FC unit are disabled. |
| 9 | FC is activated. LNG1 and LNG2 are activated. DG1 and DG2 are deactivated. | |
| Pg1max + Pg2max ≤ PL ≤ Pg1max + Pg2max + PFCmax Battery is enabled and SOC < 0.95 | EMS enters at this state when ship demands are less than power generated from LNG1, LNG2 and FC generators. Power from REs is supplying the batteries charging. | |
| 10 | Pg1max + Pg2max ≤ PL ≤ Pg1max + Pg2max + PFCmax Battery is enabled and SOC ≥ 0.95 | EMS enters at this state when ship demands are less than power generated from LNG1 and LNG2 and FC generators. Power from REs is considered spare. |
| 11 | Pg1max + Pg2max ≤ PL ≤ Pg1max + Pg2max + PFCmax Battery is disabled. | EMS enters at this state when ship demands are less than power generated from LNG1, LNG2 and FC generators. Power from REs supplies the Hydrogen Production Unit |
| 12 | FC is activated. LNG1, LNG2 and DG1 are activated. DG2 is deactivated. | |
| Pg1max + Pg2max + PFCmax ≤ PL ≤ Pg1max + Pg2max + PFCmax + Pd1max Battery is enabled and SOC < 0.95 | EMS enters at this state when ship demands are less than power generated from LNG1, LNG2, FC and DG1 generators. Power from REs is supplying the batteries charging. | |
| 13 | Pg1max + Pg2max + PFCmax ≤ PL ≤ Pg1max + Pg2max + PFCmax + Pd1max Battery is enabled and SOC ≥ 0.95 | EMS enters at this state when ship demands are less than power generated from LNG1, LNG2, FC and DG1 generators. Power from REs is considered spare. |
| 14 | Pg1max + Pg2max + PFCmax ≤ PL ≤ Pg1max + Pg2max + PFCmax + Pd1max Battery is disabled. | EMS enters at this state when ship demands are less than power generated from LNG1, LNG2, FC and DG1 generators. Power from REs is supplying the hydrogen production unit. |
| 15 | FC is activated. LNG1, LNG2, DG1 and DG2 are activated. | |
| Pg1max + Pg2max + PFCmax + Pd1max ≤ PL ≤ Pg1max + Pg2max + PFCmax + Pd1max + Pd2max Battery is enabled and SOC < 0.95 | EMS enters at this state when ship demands are less than power generated from LNG1, LNG2, FC, DG1 and DG2 generators. Power from REs is supplying the batteries charging. | |
| 16 | Pg1max + Pg2max + PFCmax + Pd1max ≤ PL ≤ Pg1max + Pg2max + PFCmax + Pd1max + Pd2max Battery is enabled and SOC ≥ 0.95 | EMS enters at this state when ship demands are less than power generated from LNG1, LNG2, FC, DG1 and DG2 generators. Power from REs is considered spare. |
| 17 | Pg1max + Pg2max + PFCmax + Pd1max ≤ PL ≤ Pg1max + Pg2max + PFCmax + Pd1max + Pd2max Battery is disabled. | EMS enters at this state when ship demands are less than power generated from LNG1, LNG2, FC, DG1 and DG2 generators. Power from REs is supplying the hydrogen production unit. |
| 18 | FC is activated. LNG1, LNG2, DG1 and DG2 are activated. | |
| PL > Pg1max + Pg2max + PFCmax + Pd1max + Pd2max Battery is enabled. | EMS enters at this state when ship demands overcome power generated from all ship generators. Power from REs is directed to battery charging. | |
| 19 | PL > Pg1max + Pg2max + PFCmax + Pd1max + Pd2max Battery is disabled. FC is enabled. | EMS enters at this state when ship demands overcome power generated from all ship generators. Power from REs is directed to the hydrogen production unit. |
| 20 | PL > Pg1max + Pg2max + PFCmax + Pd1max + Pd2max Battery and FC are disabled. | EMS enters at this state when ship demands overcome power generated from all ship generators. Selected loads are deactivated to lower the demand. Power from REs is considered spare. |
| Engine #1: Diesel Engine Generator DG1 | |
|---|---|
| Fuel Efficiency | 5000 W/L |
| Efficiency Factor | 0.7 |
| Maximum Power | 11 MW |
| CO2 Emission | 2.9 Kg/L |
| Engine #2: Diesel Engine Generator DG2 | |
| Fuel Efficiency | 6000 W/L |
| Efficiency Factor | 0.85 |
| Maximum Power | 11 MW |
| CO2 Emission | 3.1 Kg/L |
| Engine #3: Gas Engine LNG1 | |
| Fuel Efficiency | 4000 W/L |
| Efficiency Factor | 0.82 |
| Maximum Power | 8.5 MW |
| CO2 Emission | 1.8 Kg/L |
| Engine #4: Gas Engine LNG2 | |
| Fuel Efficiency | 4000 W/L |
| Efficiency Factor | 0.8 |
| Maximum Power | 8.5 MW |
| CO2 Emission | 1.8 Kg/L |
| Number of Systems’ Panels | 500 |
| Panel Surface | 14 m2 |
| Efficiency Factor | 0.75 |
| Maximum Power of PV Panel | 7 KW |
| Number of Wind Generators | 500 |
| Rotor Diameter | 1 m |
| Efficiency Factor | 0.7 |
| Rated Power of Generator | 1 KW |
| Fuel Efficiency | 39,000 W/Kg |
| Efficiency Factor | 1.0 |
| Hydrogen Tank Mass | 20,000 Kg |
| CO2 Emission | 0.1 Kg/Kg |
| Fuel Efficiency | 39,000 W/Kg |
| Efficiency Factor | 0.85 |
| Maximum Power | 3.5 MW |
| CO2 Emission | 0.001 Kg/Kg |
| Total Charging Capacitance | 200,000 Ah |
| Charging/Discharging Interface Voltage | 100 V dc |
| Charging/Discharging Efficiency Factor | 0.85 |
| Generating Units | Scenario 1 | Scenario 2 | Scenario 3 | Scenario 4 | ||||
|---|---|---|---|---|---|---|---|---|
| State | Fuel | State | Fuel | State | Fuel | State | Fuel | |
| PVs | OFF | - | ON | - | ON | - | ON | - |
| WECs | OFF | - | ON | - | ON | - | ON | - |
| DGs | ON | MDO | ON | MDO | ON | BoG | ON | MDO |
| LNGs | ON | BoG | ON | BoG | ON | BoG | ON | BoG |
| FCs | OFF | - | ON | H2 | ON | H2 | - | - |
| Generating Units | Scenario 1 | Scenario 2 | Scenario 3 | Scenario 4 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Energy MWh | Average Power | Energy MWh | Average Power | Energy MWh | Average Power | Energy MWh | Average Power | |||||
| MW | % | MW | % | MW | % | MW | % | |||||
| PVs | 0 | 0 | 30.16 | 1.2 | 30.16 | 1.2 | 30.16 | 1.2 | 5.73 | |||
| WECs | 0 | 0 | 3.26 | 0.13 | 3.26 | 0.13 | 3.26 | 0.13 | 0.62 | |||
| DGs | 99.84 | 3.96 | 18.89 | 72.67 | 2.9 | 13.84 | 72.67 | 19.9 | 94.94 | 31.2 | 1.24 | 5.92 |
| LNGs | 425 | 17 | 81.11 | 425 | 17 | 81.11 | 425 | 425 | 17 | 81.11 | ||
| FC | 0 | 0 | 22.95 | 0.91 | 4.34 | 22.95 | 0.91 | 4.34 | - | - | - | |
| Batteries Discharging | 0 | 0 | 24.16 | 0.96 | 4.58 | 24.16 | 0.96 | 4.58 | 45.61 | 1.82 | 8.68 | |
| Batteries Charging | 0 | 0 | −20.76 | −0.81 | −3.86 | −20.76 | −0.81 | −3.86 | −11.21 | −0.43 | −2.05 | |
| Total Generated | 524.84 | 20.96 | 100.00 | 524.02 | 20.96 | 100.00 | 524.02 | 20.96 | 100.00 | 524.02 | 20.96 | 100.00 |
| Generating Units | Scenario 1 | Scenario 2 | Scenario 3 | Scenario 4 | ||||
|---|---|---|---|---|---|---|---|---|
| Value | Average Value | Value | Average Value | Value | Average Value | Value | Average Value | |
| DGs | 26.81 m3 | 1.07 m3/h | 20.76 m3 | 0.83 m3/h | 22.15 m3 | 0.88 m3/h | 8.92 m3 | 0.35 m3/h |
| LNGs | 131.24 m3 | 5.24 m3/h | 131.24 m3 | 5.24 m3/h | 131.24 m3 | 5.24 m3/h | 129.6 m3 | 5.18 m3/h |
| FC | 0 | 0 | 0.69 ton | 0.02 ton/h | 0.69 ton | 0.02 ton/h | 0 | 0 |
| Generating Units | Scenario 1 | Scenario 2 | Scenario 3 | Scenario 4 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Value, ton | Average Value | Value, ton | Average Value | Value, ton | Average Value | Value, ton | Average Value | |||||
| ton/h | % | ton/h | % | ton/h | % | ton/h | % | |||||
| DGs | 77.75 | 3.11 | 24.78 | 60.21 | 2.40 | 20.24 | 39.88 | 1.59 | 14.39 | 53.5 | 2.14 | 18.66 |
| LNGs | 236.24 | 9.44 | 75.22 | 236.24 | 9.44 | 79.60 | 236.24 | 9.44 | 85.43 | 233.3 | 9.33 | 81.34 |
| FC | 0 | 0 | 0.00 | 0.27 | 0.02 | 0.17 | 0.27 | 0.02 | 0.18 | 0 | 0 | 0.00 |
| Total | 313.99 | 12.55 | 100.00 | 296.72 | 11.86 | 100.00 | 276.39 | 11.05 | 100.00 | 286.8 | 11.47 | 100.00 |
| Generating Units | Reduction of Fuel Consumption (%) | ||
|---|---|---|---|
| Scenario 1→2 | Scenario 2→3 | Scenario 3→4 | |
| DGs | −22.57% | +6.7% | −59.73% |
| LNGs | 0% | 0% | −1.25% |
| FC | 100% | 0% | - |
| Generating Units | Reduction of CO2 Emissions (%) | ||
|---|---|---|---|
| Scenario 1→2 | Scenario 2→3 | Scenario 3→4 | |
| DGs | −22.57% | −33.77% | 33.65% |
| LNGs | 0% | 0% | −1.25% |
| FC | 100% | 0% | - |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Stamatakis, M.E.; Stamataki, E.E.; Stamelos, A.P.; Ioannides, M.G. Energy Management in a Super-Tanker Powered by Solar, Wind, Hydrogen and Boil-Off Gas for Saving CO2 Emissions. Electronics 2024, 13, 1567. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics13081567
Stamatakis ME, Stamataki EE, Stamelos AP, Ioannides MG. Energy Management in a Super-Tanker Powered by Solar, Wind, Hydrogen and Boil-Off Gas for Saving CO2 Emissions. Electronics. 2024; 13(8):1567. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics13081567
Chicago/Turabian StyleStamatakis, Michael E., Erofili E. Stamataki, Anastasios P. Stamelos, and Maria G. Ioannides. 2024. "Energy Management in a Super-Tanker Powered by Solar, Wind, Hydrogen and Boil-Off Gas for Saving CO2 Emissions" Electronics 13, no. 8: 1567. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics13081567