
Sun/Shade Separation in Optical and Thermal UAV Images for Assessing the Impact of Agricultural Practices

 ,
,
Abstract
:1. Introduction
2. Materials
2.1. Study Site
2.2. Agricultural Management
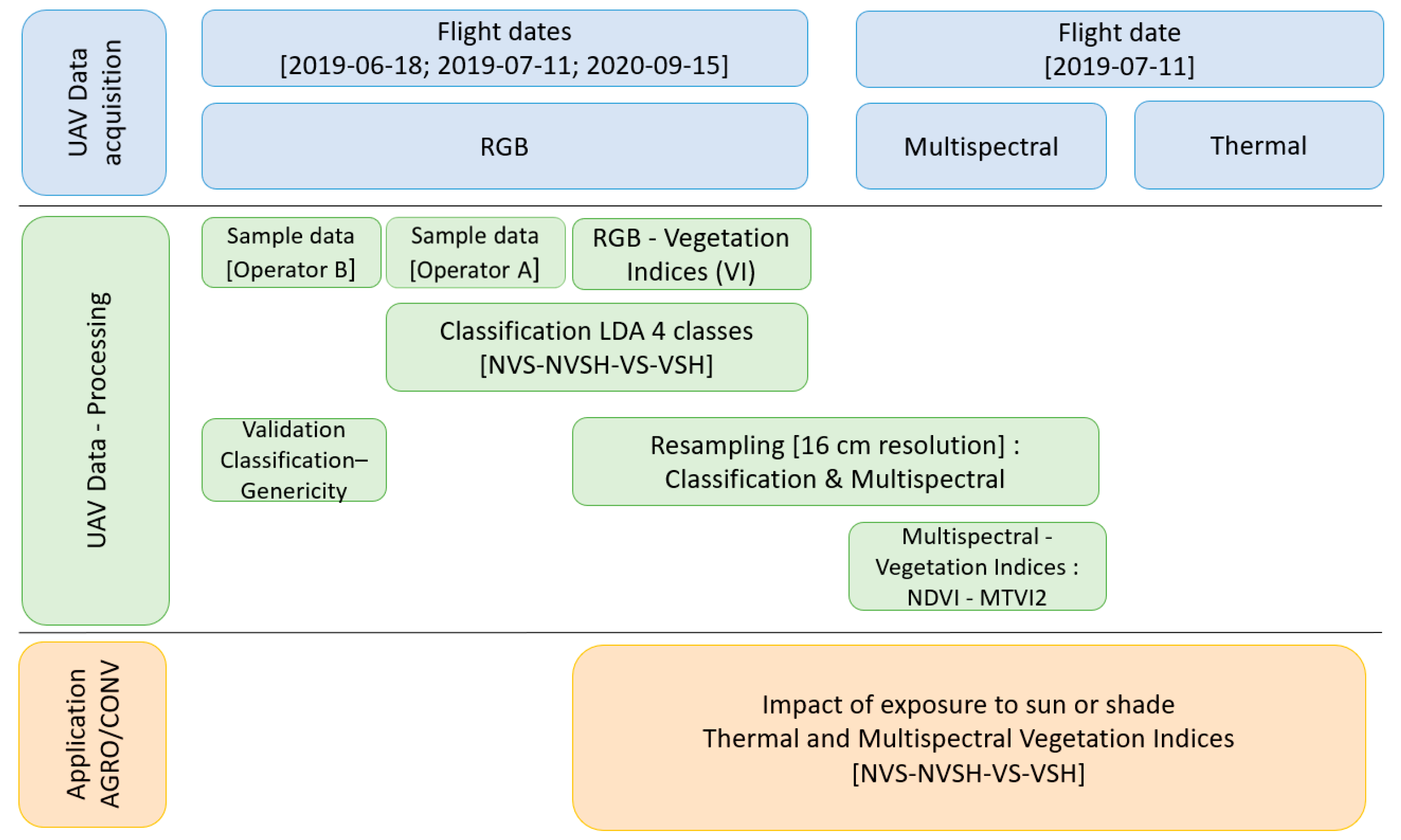
2.3. Data Used in the Study
2.3.1. UAV Data
2.3.2. Sample Data
3. Method for Automatic Detection of Shaded and Sunlit Surfaces
3.1. Vegetation Indices (VI)
3.2. Choice of Predictor Variables and Detection of the Four Land Cover Classes
3.3. Re-Sampling of Classification Images
4. Results and Analysis
4.1. Evaluation of the Classification Model Performed on the RGB Image at 3 cm Resolution
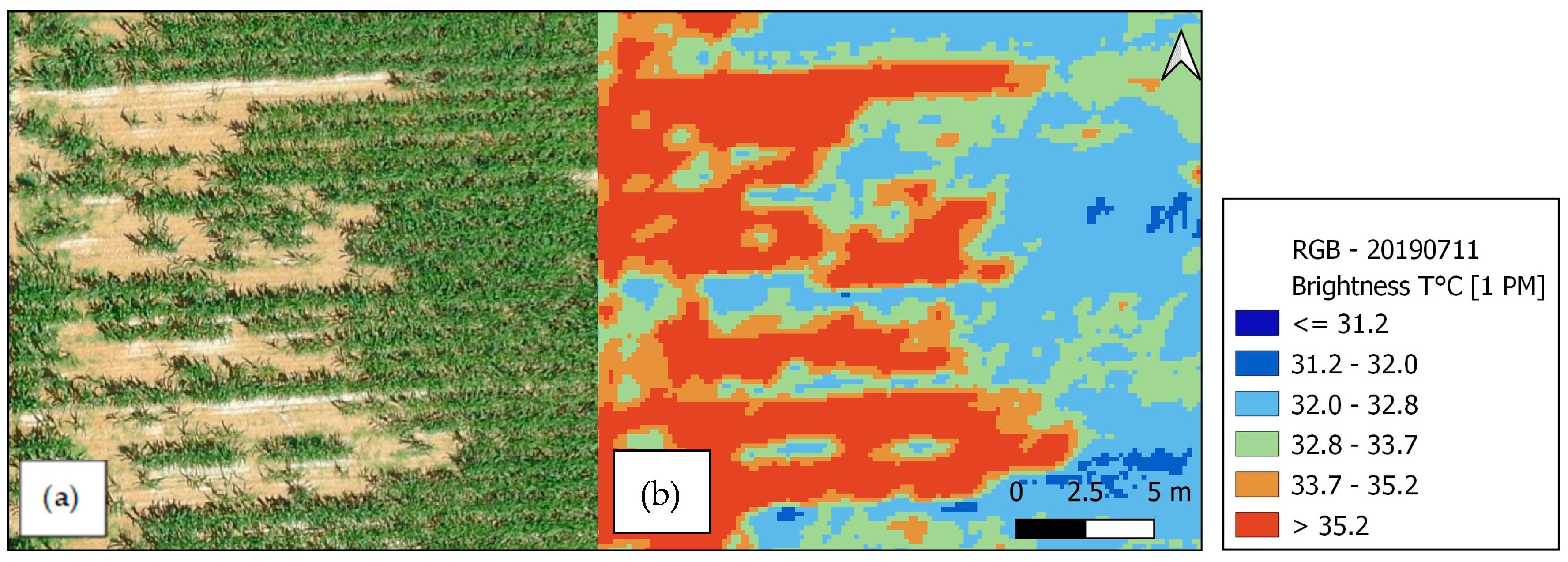
4.1.1. Application to the Entire Site during the Vegetation Season (11 July 2019)
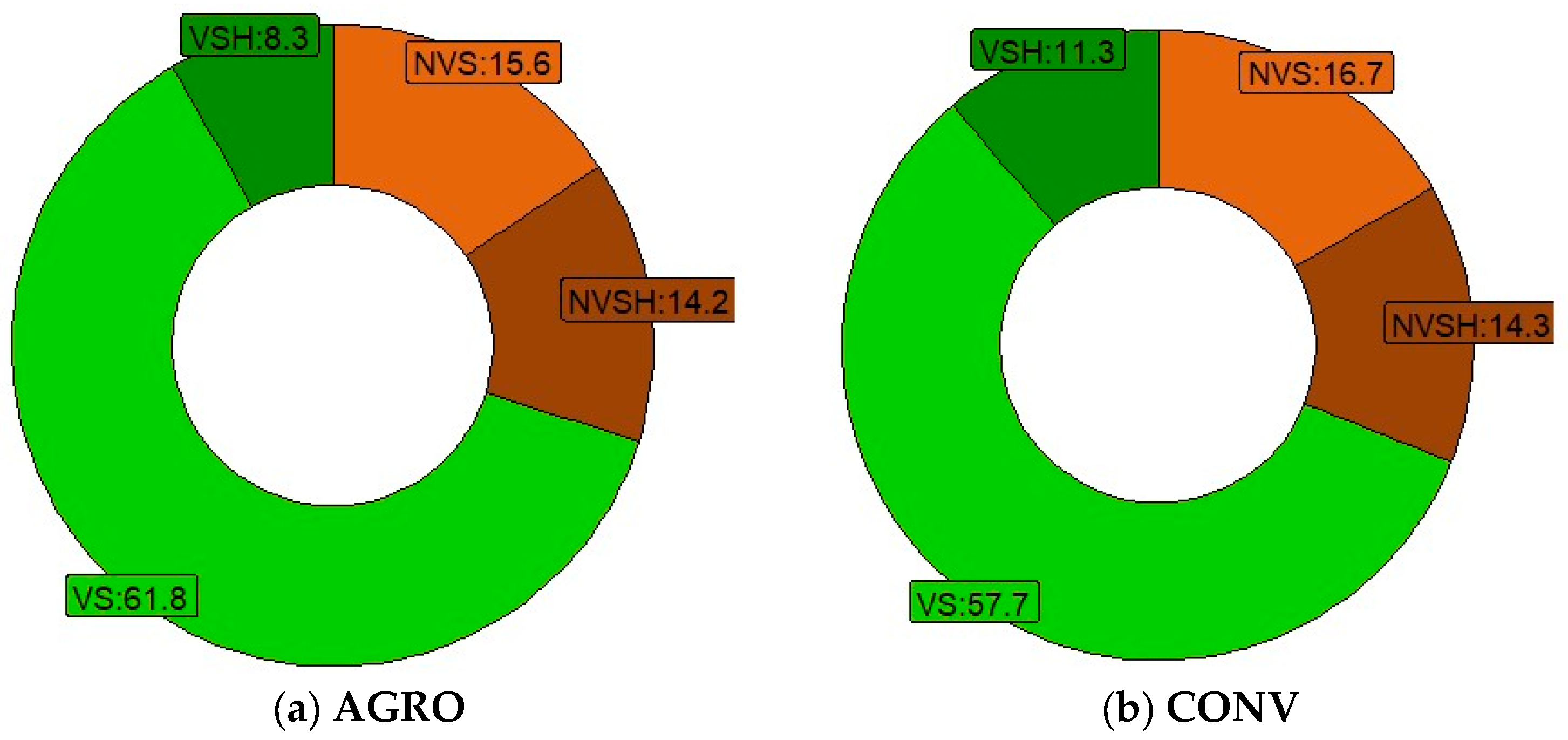
4.1.2. Separation of Results by Crop Type: AGRO/CONV (for the 11 July 2019)
4.2. Application of Classification to Temperature and Vegetation Index Images at 16 cm Resolution
4.2.1. Overall Results for the Entire Study Site
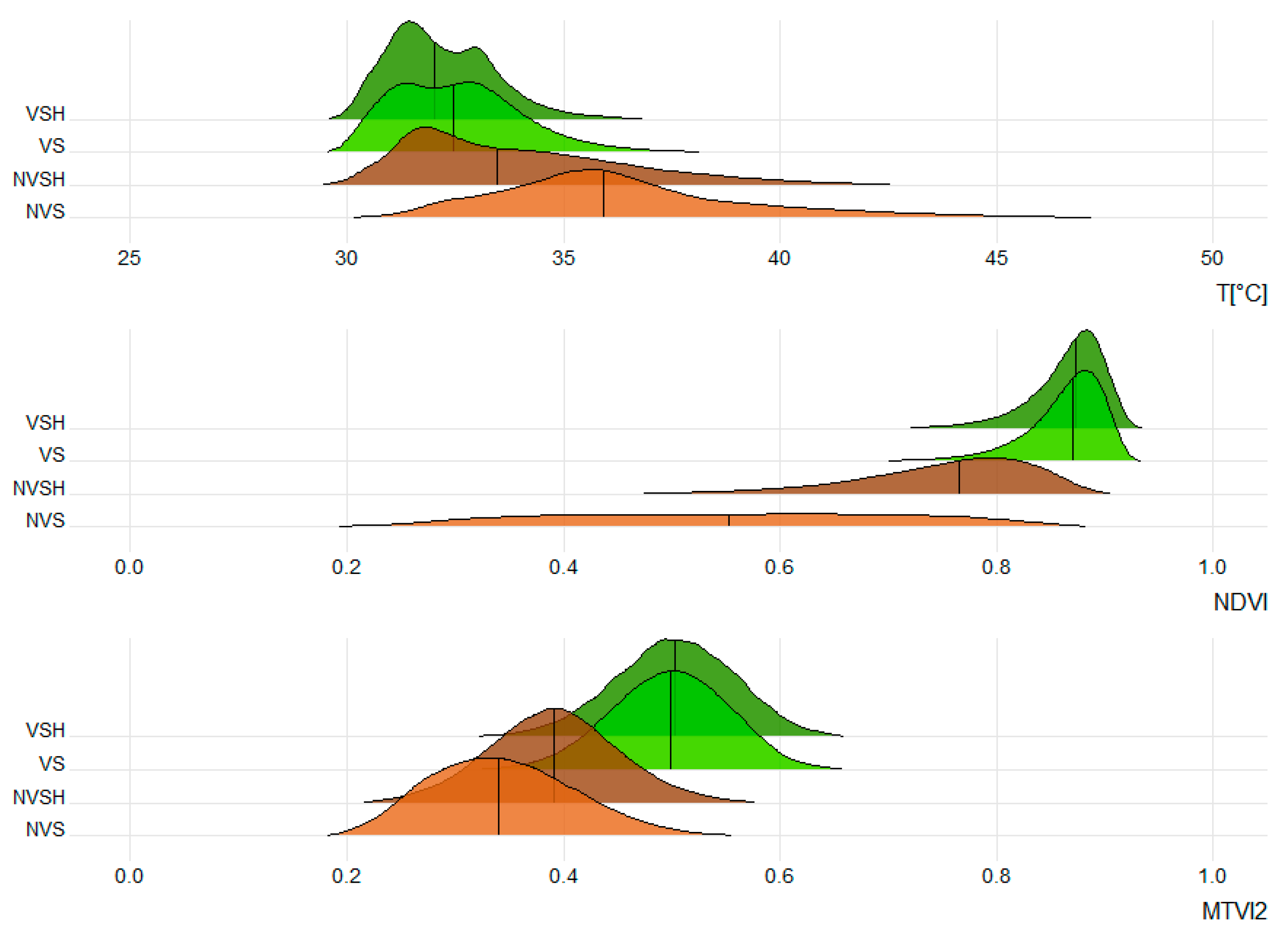
4.2.2. Separation of Temperature Results for AGRO and CONV
4.2.3. Separation of AGRO and CONV Results for Vegetation Indices
5. Summary and Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gates, D.M.; Keegan, H.J.; Schleter, J.C.; Weidner, V.R. Spectral Properties of Plants. Appl. Opt. 1965, 4, 11. [Google Scholar] [CrossRef]
- Hatfield, J.L.; Gitelson, A.A.; Schepers, J.S.; Walthall, C.L. Application of Spectral Remote Sensing for Agronomic Decisions. Agron. J. 2008, 100, S-117–S-131. [Google Scholar] [CrossRef]
- Escadafal, R. Remote Sensing of Soil Color: Principles and Applications. Remote Sens. Rev. 1993, 7, 261–279. [Google Scholar] [CrossRef]
- Bannari, A.; Pacheco, A.; Staenz, K.; McNairn, H.; Omari, K. Estimating and Mapping Crop Residues Cover on Agricultural Lands Using Hyperspectral and IKONOS Data. Remote Sens. Environ. 2006, 104, 447–459. [Google Scholar] [CrossRef]
- Jordan, C.F. Derivation of Leaf-Area Index from Quality of Light on the Forest Floor. Ecology 1969, 50, 663–666. [Google Scholar] [CrossRef]
- Hatfield, J.L.; Prueger, J.H.; Sauer, T.J.; Dold, C.; O’Brien, P.; Wacha, K. Applications of Vegetative Indices from Remote Sensing to Agriculture: Past and Future. Inventions 2019, 4, 71. [Google Scholar] [CrossRef]
- Hatfield, J.L.; Prueger, J.H. Value of Using Different Vegetative Indices to Quantify Agricultural Crop Characteristics at Different Growth Stages under Varying Management Practices. Remote Sens. 2010, 2, 562–578. [Google Scholar] [CrossRef]
- Guijarro, M.; Pajares, G.; Riomoros, I.; Herrera, P.J.; Burgos-Artizzu, X.P.; Ribeiro, A. Automatic Segmentation of Relevant Textures in Agricultural Images. Comput. Electron. Agric. 2011, 75, 75–83. [Google Scholar] [CrossRef]
- Lee, M.-K.; Golzarian, M.R.; Kim, I. A New Color Index for Vegetation Segmentation and Classification. Precis. Agric. 2021, 22, 179–204. [Google Scholar] [CrossRef]
- Xue, J.; Su, B. Significant Remote Sensing Vegetation Indices: A Review of Developments and Applications. J. Sens. 2017, 2017, 1353691. [Google Scholar] [CrossRef]
- Rouse, J.W., Jr.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring Vegetation Systems in the Great Plains with Erts. In NASA Special Publication; NASA: Washington, DC, USA, 1974; Volume 351, p. 309. [Google Scholar]
- Tucker, C.J. Red and Photographic Infrared Linear Combinations for Monitoring Vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef]
- Hamuda, E.; Glavin, M.; Jones, E. A Survey of Image Processing Techniques for Plant Extraction and Segmentation in the Field. Comput. Electron. Agric. 2016, 125, 184–199. [Google Scholar] [CrossRef]
- Hunt, E.R.; Doraiswamy, P.C.; McMurtrey, J.E.; Daughtry, C.S.T.; Perry, E.M.; Akhmedov, B. A Visible Band Index for Remote Sensing Leaf Chlorophyll Content at the Canopy Scale. Int. J. Appl. Earth Obs. Geoinf. 2012, 21, 103–112. [Google Scholar] [CrossRef]
- Giovos, R.; Tassopoulos, D.; Kalivas, D.; Lougkos, N.; Priovolou, A. Remote Sensing Vegetation Indices in Viticulture: A Critical Review. Agriculture 2021, 11, 457. [Google Scholar] [CrossRef]
- Jantzi, H.; Marais-Sicre, C.; Maire, E.; Barcet, H.; Guillerme, S. Diachronic Mapping of Invasive Plants Using Airborne RGB Imagery in a Central Pyrenees Landscape (South-West France). In Proceedings of the IECAG 2021, Basel, Switzerland, 11 May 2021; p. 51. [Google Scholar]
- Ayamga, M.; Akaba, S.; Nyaaba, A.A. Multifaceted Applicability of Drones: A Review. Technol. Forecast Soc. Change 2021, 167, 120677. [Google Scholar] [CrossRef]
- Kumar, A.; Shreeshan, S.; Tejasri, N.; Rajalakshmi, P.; Guo, W.; Naik, B.; Marathi, B.; Desai, U.B. Identification of Water-Stressed Area in Maize Crop Using Uav Based Remote Sensing. In Proceedings of the 2020 IEEE India Geoscience and Remote Sensing Symposium (InGARSS), Ahmedabad, India, 1–4 December 2020; pp. 146–149. [Google Scholar]
- Goswami, J.; Sharma, V.; Chaudhury, B.U.; Raju, P.L.N. Rapid identification of abiotic stress (frost) in in-filed maize crop using UAV remote sensing. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 42, 467–471. [Google Scholar] [CrossRef]
- Singh, A.P.; Yerudkar, A.; Mariani, V.; Iannelli, L.; Glielmo, L. A Bibliometric Review of the Use of Unmanned Aerial Vehicles in Precision Agriculture and Precision Viticulture for Sensing Applications. Remote Sens. 2022, 14, 1604. [Google Scholar] [CrossRef]
- Matese, A.; Di Gennaro, S. Practical Applications of a Multisensor UAV Platform Based on Multispectral, Thermal and RGB High Resolution Images in Precision Viticulture. Agriculture 2018, 8, 116. [Google Scholar] [CrossRef]
- Moller, M.; Alchanatis, V.; Cohen, Y.; Meron, M.; Tsipris, J.; Naor, A.; Ostrovsky, V.; Sprintsin, M.; Cohen, S. Use of Thermal and Visible Imagery for Estimating Crop Water Status of Irrigated Grapevine. J. Exp. Bot. 2006, 58, 827–838. [Google Scholar] [CrossRef]
- Gontia, N.K.; Tiwari, K.N. Development of Crop Water Stress Index of Wheat Crop for Scheduling Irrigation Using Infrared Thermometry. Agric. Water Manag. 2008, 95, 1144–1152. [Google Scholar] [CrossRef]
- Jones, H.G.; Serraj, R.; Loveys, B.R.; Xiong, L.; Wheaton, A.; Price, A.H. Thermal Infrared Imaging of Crop Canopies for the Remote Diagnosis and Quantification of Plant Responses to Water Stress in the Field. Funct. Plant Biol. 2009, 36, 978. [Google Scholar] [CrossRef] [PubMed]
- Alchanatis, V.; Cohen, Y.; Cohen, S.; Moller, M.; Sprinstin, M.; Meron, M.; Tsipris, J.; Saranga, Y.; Sela, E. Evaluation of Different Approaches for Estimating and Mapping Crop Water Status in Cotton with Thermal Imaging. Precis. Agric. 2010, 11, 27–41. [Google Scholar] [CrossRef]
- Romano, G.; Zia, S.; Spreer, W.; Sanchez, C.; Cairns, J.; Araus, J.L.; Müller, J. Use of Thermography for High Throughput Phenotyping of Tropical Maize Adaptation in Water Stress. Comput. Electron. Agric. 2011, 79, 67–74. [Google Scholar] [CrossRef]
- Feng, L.; Chen, S.; Zhang, C.; Zhang, Y.; He, Y. A Comprehensive Review on Recent Applications of Unmanned Aerial Vehicle Remote Sensing with Various Sensors for High-Throughput Plant Phenotyping. Comput. Electron. Agric. 2021, 182, 106033. [Google Scholar] [CrossRef]
- Sagan, V.; Maimaitijiang, M.; Sidike, P.; Eblimit, K.; Peterson, K.T.; Hartling, S.; Esposito, F.; Khanal, K.; Newcomb, M.; Pauli, D.; et al. UAV-Based High Resolution Thermal Imaging for Vegetation Monitoring, and Plant Phenotyping Using ICI 8640 P, FLIR Vue Pro R 640, and Thermomap Cameras. Remote Sens. 2019, 11, 330. [Google Scholar] [CrossRef]
- Maimaitijiang, M.; Ghulam, A.; Sidike, P.; Hartling, S.; Maimaitiyiming, M.; Peterson, K.; Shavers, E.; Fishman, J.; Peterson, J.; Kadam, S.; et al. Unmanned Aerial System (UAS)-Based Phenotyping of Soybean Using Multi-Sensor Data Fusion and Extreme Learning Machine. ISPRS J. Photogramm. Remote Sens. 2017, 134, 43–58. [Google Scholar] [CrossRef]
- Wang, T.; Chandra, A.; Jung, J.; Chang, A. UAV Remote Sensing Based Estimation of Green Cover during Turfgrass Establishment. Comput. Electron. Agric. 2022, 194, 106721. [Google Scholar] [CrossRef]
- Avola, G.; Filippo, S.; Gennaro, D.; Cantini, C.; Riggi, E.; Muratore, F.; Tornambè, C.; Matese, A. Remote Sensing Communication Remotely Sensed Vegetation Indices to Discriminate Field-Grown Olive Cultivars. Remote Sens. 2019, 11, 1242. [Google Scholar] [CrossRef]
- Grillakis, M.G.; Doupis, G.; Kapetanakis, E.; Goumenaki, E. Future Shifts in the Phenology of Table Grapes on Crete under a Warming Climate. Agric. Meteorol. 2022, 318, 108915. [Google Scholar] [CrossRef]
- Olsson, L.; Barbosa, H.; Bhadwal, S.; Cowie, A.; Delusca, K.; Flores-Renteria, D.; Hermans, K.; Jobbagy, E.; Kurz, W.; Li, D.; et al. Land Degradation. In Climate Change and Land; Cambridge University Press: Cambridge, UK, 2022; pp. 345–436. [Google Scholar]
- Mbow, C.; Rosenzweig, C.; Barioni, L.G.; Benton, T.G.; Herrero, M.; Krishnapillai, M.; Liwenga, E.; Pradhan, P.; RiveraFerre, M.G.; Sapkota, T.; et al. Food Security. In Climate Change and Land; Cambridge University Press: Cambridge, UK, 2022; pp. 437–550. [Google Scholar]
- Altieri, M.A. Agroecology: The Scientific Basis of Alternative Agriculture; Intermediate Publications: London, UK, 1987. [Google Scholar]
- Baize, D.; Girard, M.C. Référentiel Pédologique; Association Française pour L’étude du Sol: Versailles, France, 2008. [Google Scholar]
- Alletto, L.; Cueff, S.; Bréchemier, J.; Lachaussée, M.; Derrouch, D.; Page, A.; Gleizes, B.; Perrin, P.; Bustillo, V. Physical Properties of Soils under Conservation Agriculture: A Multi-Site Experiment on Five Soil Types in South-Western France. Geoderma 2022, 428, 116228. [Google Scholar] [CrossRef]
- Breil, N.L.; Lamaze, T.; Bustillo, V.; Marcato-Romain, C.-E.; Coudert, B.; Queguiner, S.; Jarosz-Pellé, N. Combined Impact of No-Tillage and Cover Crops on Soil Carbon Stocks and Fluxes in Maize Crops. Soil Tillage Res. 2023, 233, 105782. [Google Scholar] [CrossRef]
- Boitard, P.; Coudert, B.; Lauret, N.; Queguiner, S.; Marais-Sicre, C.; Regaieg, O.; Wang, Y.; Gastellu-Etchegorry, J.-P. Calibration of DART 3D Model with UAV and Sentinel-2 for Studying the Radiative Budget of Conventional and Agro-Ecological Maize Fields. Remote Sens. Appl. 2023, 32, 101079. [Google Scholar] [CrossRef]
- La Salandra, M.; Colacicco, R.; Dellino, P.; Capolongo, D. An Effective Approach for Automatic River Features Extraction Using High-Resolution UAV Imagery. Drones 2023, 7, 70. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Pajares, G.; Montalvo, M.; Romeo, J.; Guijarro, M. Support Vector Machines for Crop/Weeds Identification in Maize Fields. Expert Syst. Appl. 2012, 39, 11149–11155. [Google Scholar] [CrossRef]
- Richardsons, A.J.; Wiegand, A. Distinguishing Vegetation from Soil Background Information. Photogramm. Eng. Remote Sens. 1977, 43, 1541–1552. [Google Scholar]
- Mathieu, R.; Pouget, M.; Cervelle, B.; Escadafal, R. Relationships between Satellite-Based Radiometric Indices Simulated Using Laboratory Reflectance Data and Typic Soil Color of an Arid Environment. Remote Sens. Environ. 1998, 66, 17–28. [Google Scholar] [CrossRef]
- Louhaichi, M.; Borman, M.M.; Johnson, D.E. Spatially Located Platform and Aerial Photography for Documentation of Grazing Impacts on Wheat. Geocarto Int. 2001, 16, 65–70. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Stark, R.; Grits, U.; Rundquist, D.; Kaufman, Y.; Derry, D. Vegetation and Soil Lines in Visible Spectral Space: A Concept and Technique for Remote Estimation of Vegetation Fraction. Int. J. Remote Sens. 2002, 23, 2537–2562. [Google Scholar] [CrossRef]
- Zarco-Tejada, P.J.; Berjón, A.; López-Lozano, R.; Miller, J.R.; Martín, P.; Cachorro, V.; González, M.R.; De Frutos, A. Assessing Vineyard Condition with Hyperspectral Indices: Leaf and Canopy Reflectance Simulation in a Row-Structured Discontinuous Canopy. Remote Sens. Environ. 2005, 99, 271–287. [Google Scholar] [CrossRef]
- Kataoka, T.; Kaneko, T.; Okamoto, H.; Hata, S. Crop Growth Estimation System Using Machine Vision. In Proceedings of the 2003 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM 2003), Kobe, Japan, 20–24 July 2003; pp. b1079–b1083. [Google Scholar]
- Gamon, J.A.; Surfus, J.S. Assessing Leaf Pigment Content and Activity with a Reflectometer. New Phytol. 1999, 143, 105–117. [Google Scholar] [CrossRef]
- Bendig, J.; Yu, K.; Aasen, H.; Bolten, A.; Bennertz, S.; Broscheit, J.; Gnyp, M.L.; Bareth, G. Combining UAV-Based Plant Height from Crop Surface Models, Visible, and near Infrared Vegetation Indices for Biomass Monitoring in Barley. Int. J. Appl. Earth Obs. Geoinf. 2015, 39, 79–87. [Google Scholar] [CrossRef]
- Woebbecke, D.M.; Meyer, G.E.; Von Bargen, K.; Mortensen, D.A. Color Indices for Weed Identification Under Various Soil, Residue, and Lighting Conditions. Trans. ASAE 1995, 38, 259–269. [Google Scholar] [CrossRef]
- Meyer, G.E.; Neto, J.C. Verification of Color Vegetation Indices for Automated Crop Imaging Applications. Comput. Electron. Agric. 2008, 63, 282–293. [Google Scholar] [CrossRef]
- Eitel, J.U.H.; Long, D.S.; Gessler, P.E.; Smith, A.M.S. Using In-situ Measurements to Evaluate the New RapidEyeTMsatellite Series for Prediction of Wheat Nitrogen Status. Int. J. Remote Sens. 2007, 28, 4183–4190. [Google Scholar] [CrossRef]
- Hatfield, J.L.; Asrar, G.; Kanemasu, E.T. Intercepted Photosynthetically Active Radiation Estimated by Spectral Reflectance. Remote Sens. Environ. 1984, 14, 65–75. [Google Scholar] [CrossRef]
- Chiang, L.H.; Russell, E.L.; Braatz, R.D. Fault Detection and Diagnosis in Industrial Systems. Meas. Sci. Technol. 2001, 12, 1745. [Google Scholar] [CrossRef]
- Cohen, J. A Coefficient of Agreement for Nominal Scales. Educ. Psychol. Meas. 1960, 20, 37–46. [Google Scholar] [CrossRef]
- Congalton, R.G. A Review of Assessing the Accuracy of Classifications of Remotely Sensed Data. Remote Sens. Environ. 1991, 37, 35–46. [Google Scholar] [CrossRef]
- Foody, G.M. Explaining the Unsuitability of the Kappa Coefficient in the Assessment and Comparison of the Accuracy of Thematic Maps Obtained by Image Classification. Remote Sens Environ. 2020, 239, 111630. [Google Scholar] [CrossRef]
- Powers David, M.W. Evaluation: From Precision, Recall and F-Measure to ROC, Informedness, Markedness and Correlation. J. Mach. Learn. Technol. 2011, 2, 37–63. [Google Scholar]
- Sandholt, I.; Rasmussen, K.; Andersen, J. A Simple Interpretation of the Surface Temperature/Vegetation Index Space for Assessment of Surface Moisture Status. Remote Sens. Environ. 2002, 79, 213–224. [Google Scholar] [CrossRef]
- Park, S.; Ryu, D.; Fuentes, S.; Chung, H.; Hernández-Montes, E.; O’Connell, M. Adaptive Estimation of Crop Water Stress in Nectarine and Peach Orchards Using High-Resolution Imagery from an Unmanned Aerial Vehicle (UAV). Remote Sens. 2017, 9, 828. [Google Scholar] [CrossRef]
- Poblete, T.; Ortega-Farías, S.; Ryu, D. Automatic Coregistration Algorithm to Remove Canopy Shaded Pixels in UAV-Borne Thermal Images to Improve the Estimation of Crop Water Stress Index of a Drip-Irrigated Cabernet Sauvignon Vineyard. Sensors 2018, 18, 397. [Google Scholar] [CrossRef]
- Sepúlveda-Reyes, D.; Ingram, B.; Bardeen, M.; Zúñiga, M.; Ortega-Farías, S.; Poblete-Echeverría, C. Selecting Canopy Zones and Thresholding Approaches to Assess Grapevine Water Status by Using Aerial and Ground-Based Thermal Imaging. Remote Sens. 2016, 8, 822. [Google Scholar] [CrossRef]
- Regaieg, O.; Yin, T.; Malenovský, Z.; Cook, B.D.; Morton, D.C.; Gastellu-Etchegorry, J.-P. Assessing Impacts of Canopy 3D Structure on Chlorophyll Fluorescence Radiance and Radiative Budget of Deciduous Forest Stands Using DART. Remote Sens Environ. 2021, 265, 112673. [Google Scholar] [CrossRef]
- Lagouarde, J.-P.; Bhattacharya, B.K.; Crébassol, P.; Gamet, P.; Adlakha, D.; Murthy, C.S.; Singh, S.K.; Mishra, M.; Nigam, R.; Raju, P.V.; et al. Indo-French high-resolution thermal infrared space mission for Earth natural resources assessment and monitoring–Concept and definition of TRISHNA. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 42, 403–407. [Google Scholar] [CrossRef]
- Norman, J.M.; Kustas, W.P.; Humes, K.S. Source Approach for Estimating Soil and Vegetation Energy Fluxes in Observations of Directional Radiometric Surface Temperature. Agric. For. Meteorol. 1995, 77, 263–293. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Conservation Practice: AGRO Plot | Conventional Practice: CONV Plot | |
|---|---|---|
| 18 June 2019 | Crop residues (n − 1, weeds) & Corn emergence (4–5 leaf stage) Inter-rows: 0.4 m/inter-feet: 0.25 m Sprinkler irrigation: 105 mm | Corn (8–9 leaf stage) Inter-rows: 0.8 m/inter-feet: 0.125 m Sprinkler irrigation: 120 mm |
| 11 July 2019 | Corn (8–9 leaf stage) | Corn flowering |
| 15 September 2020 | Two vegetation stages: North Corn senescence, South Late Flowering corn. | Soybean senescence |
| Flight Date | Start Flight Hour | Flight Altitude [m] | Resolution [m] | |
|---|---|---|---|---|
| Multi Spectral | 2019-06-18 | 12:57 PM | 134 | 0.14 |
| (multiSPEC4C sensor) G 550 nm - | 2019-07-11 | 11:49 AM | 115 | 0.12 |
| R 660 nm—RE 735 nm—NIR 790 nm | 2020-09-15 | 11:11 AM | 134 | 0.14 |
| Thermal (Thermomap sensor) | T°1—2019-07-11 | 12:49 PM | 85 | 0.16 |
| 7.2 & 13.5 nm | T°2—2019-07-11 | 03:10 PM | 85 | 0.16 |
| RGB | 2019-06-18 | 12:12 PM | 123 | 0.03 |
| (SODA senso) | 2019-07-11 | 10:28 AM | 115 | 0.03 |
| R 450 nm—G 520 nm—B 660 nm | 2020-09-15 | 10:35 AM | 123 | 0.03 |
| VI | Description | Equation | Reference |
|---|---|---|---|
| BI | Brightness Index | sqrt ((R^ + G2 + B2)/3) | Richardson & Wiegand [42] |
| SCI | Soil Colour Index | (R − G)/(R + G) | Mathieu et al. [43] |
| GLI | Green Leaf Index | (2 × G − R − B)/(2 × G + R + B) | Louhaichi et al. [44] |
| HI | Hue index | (2 × R − G − B)/(G − B) | Escadafal [3] |
| Si | Spectral Slope Saturation Index | (R − B)/(R + B) | Escadafal [3] |
| VARI | Visible Atmospherically Resistant Index | (G − R)/(G + R − B) | Gitelson et al. [45] |
| HUE | Overall Hue Index | arctan(2 × (B − G − R)/30.5(G − R)) | Escadafal [3] |
| BGI | Blue green pigment index | B/G | Zarco-Tejada et al. [46] |
| CIVE | Colour Index of Vegetation Extraction | (0.441 × R) − (0.881 × G) + (0.385 × B) + 18.78745 | Kataoka et al. [47] |
| COM2 | Combined Indices (COM2) | (0.36 × E × G) + (0.47 × CIVE) + (0.17 × (G/(R0.667 × B0.333))) | Guerrero et al. [42] |
| RGRI | R/G | Gamon and Surfus [48] | |
| MGRVI | Modified Green Red Vegetation Index | (G2 − R2)/(G2 + R2) | Bendig et al. [49] |
| RGBVI | Red Green Blue Vegetation Index | (G2 − R × B)/(G2 + R*B) | Bendig et al. [49] |
| EXG | Excess Green Index | 2 × G − R − B | Woebbecke et al. [50] |
| EXGR | Excess Green minus Red Index | ExG − (1.4 × R − G) | Meyer and Neto [51] |
| Colour Index | Colour Index | R − G | “Non-normalised index, no specific reference” |
| NDVI | Normalized Difference Vegetation Index | NIR − R/NIR + R | Tucker et al. [12] |
| MTVI2 | Modified Triangular Vegetation Index | (1.5 × (1.2 × (NIR − R) − 2.5 × (G − R)))/sqrt((2 × NIR +1)2 − (6 × NIR − 5 × sqrt(G)) − 0.5) | Eitel et al. [52] |
| Model | 11 July 2019 Model | 18 June 2019 Model | 15 September 2020 Model | ||||
|---|---|---|---|---|---|---|---|
| Date | OA | Kappa | OA | Kappa | OA | Kappa | |
| 11 July 2019 | 0.95 | 0.92 | x | x | x | x | |
| 18 June 2019 | 0.87 | 0.75 | 0.96 | 0.93 | x | x | |
| 15 September 2020 | 0.68 | 0.55 | x | x | 0.96 | 0.94 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Marais-Sicre, C.; Queguiner, S.; Bustillo, V.; Lesage, L.; Barcet, H.; Pelle, N.; Breil, N.; Coudert, B. Sun/Shade Separation in Optical and Thermal UAV Images for Assessing the Impact of Agricultural Practices. Remote Sens. 2024, 16, 1436. https://0-doi-org.brum.beds.ac.uk/10.3390/rs16081436
Marais-Sicre C, Queguiner S, Bustillo V, Lesage L, Barcet H, Pelle N, Breil N, Coudert B. Sun/Shade Separation in Optical and Thermal UAV Images for Assessing the Impact of Agricultural Practices. Remote Sensing. 2024; 16(8):1436. https://0-doi-org.brum.beds.ac.uk/10.3390/rs16081436
Chicago/Turabian StyleMarais-Sicre, Claire, Solen Queguiner, Vincent Bustillo, Luka Lesage, Hugues Barcet, Nathalie Pelle, Nicolas Breil, and Benoit Coudert. 2024. "Sun/Shade Separation in Optical and Thermal UAV Images for Assessing the Impact of Agricultural Practices" Remote Sensing 16, no. 8: 1436. https://0-doi-org.brum.beds.ac.uk/10.3390/rs16081436