

Fractional-Order PIλDμ Control to Enhance the Driving Smoothness of Active Vehicle Suspension in Electric Vehicles

Abstract
:1. Introduction
2. Modeling of Suspension and Road Surface
2.1. 8-DoF Active Suspension with Active Seat
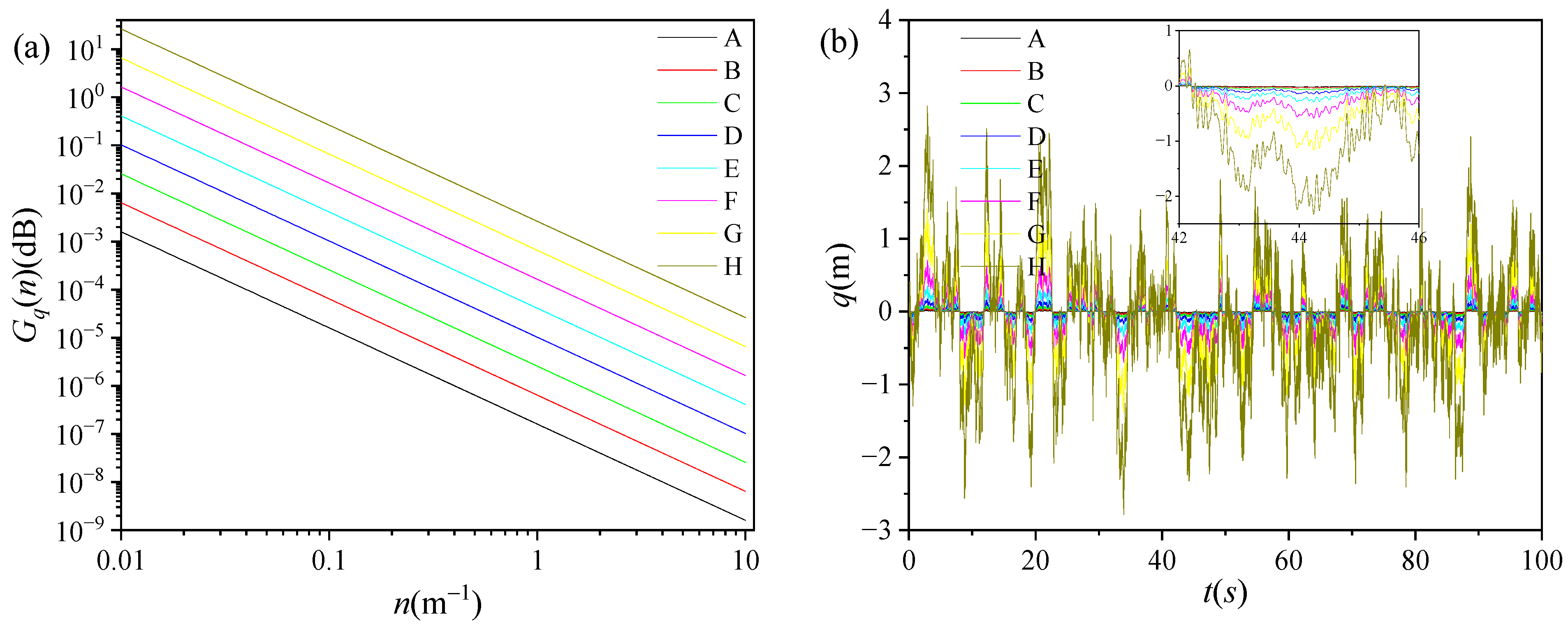
2.2. Mathematical Model of Road Excitation
2.2.1. Description of Road Excitation at Single Wheel
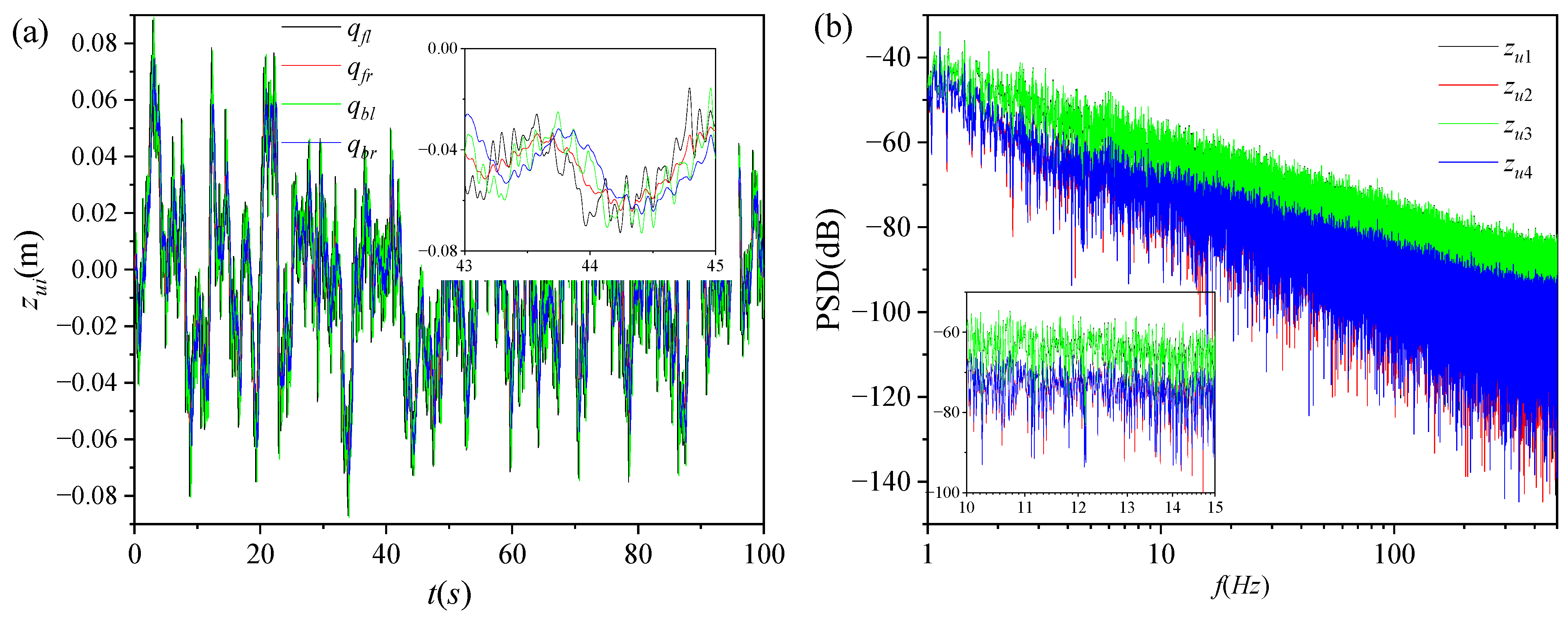
2.2.2. Delay between Front and Rear-Wheel Tracks
2.2.3. Coherence between Left and Right-Wheel Tracks
3. Methods
3.1. Fractional-Order PIλDμ
3.1.1. Fractional-Order Calculus Theory
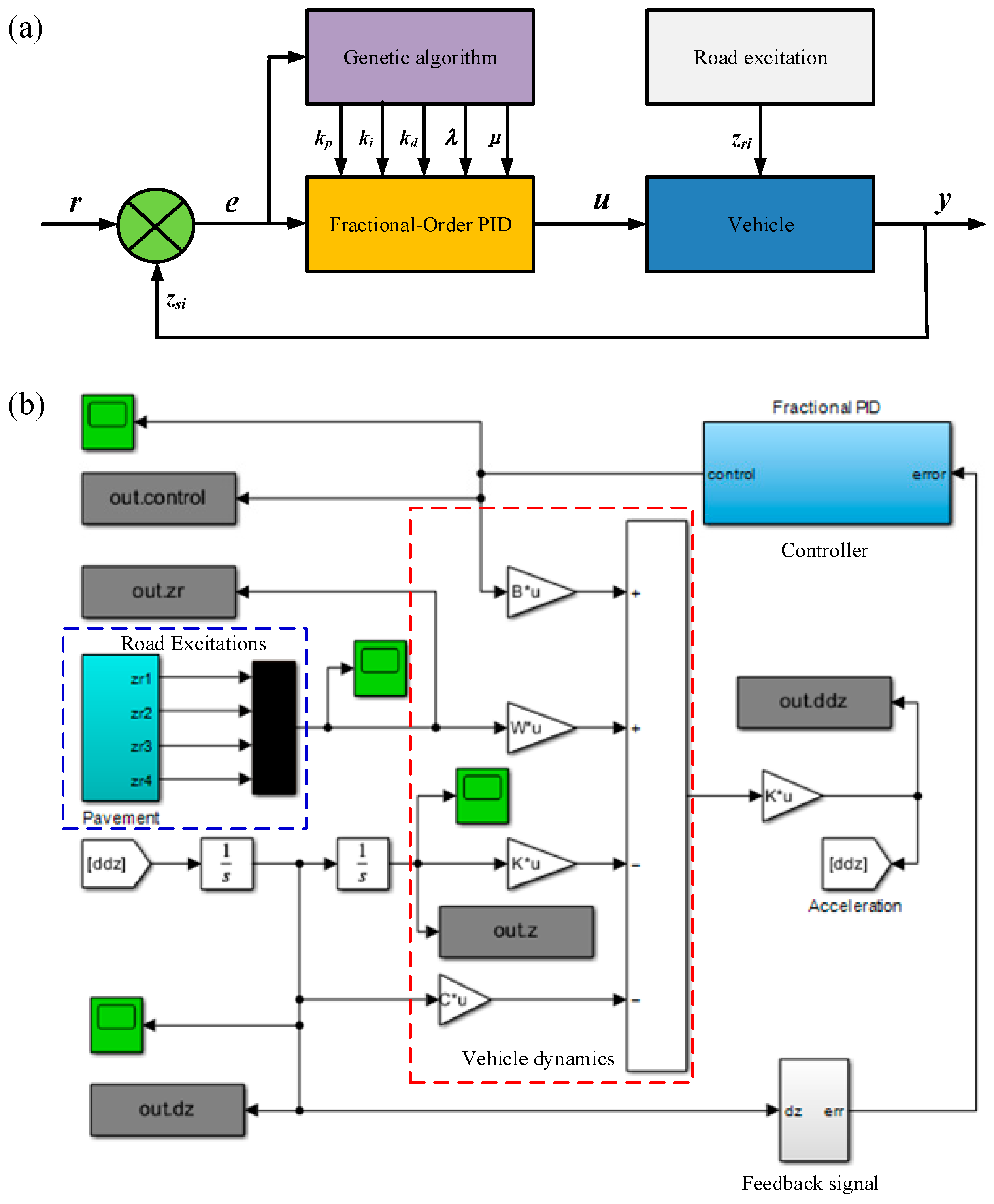
3.1.2. Structure of Fractional-Order PIλDμ Controller
3.2. Genetic Algorithm
3.2.1. Process of Genetic Algorithm
3.2.2. Implementation of Genetic Algorithm
4. Results
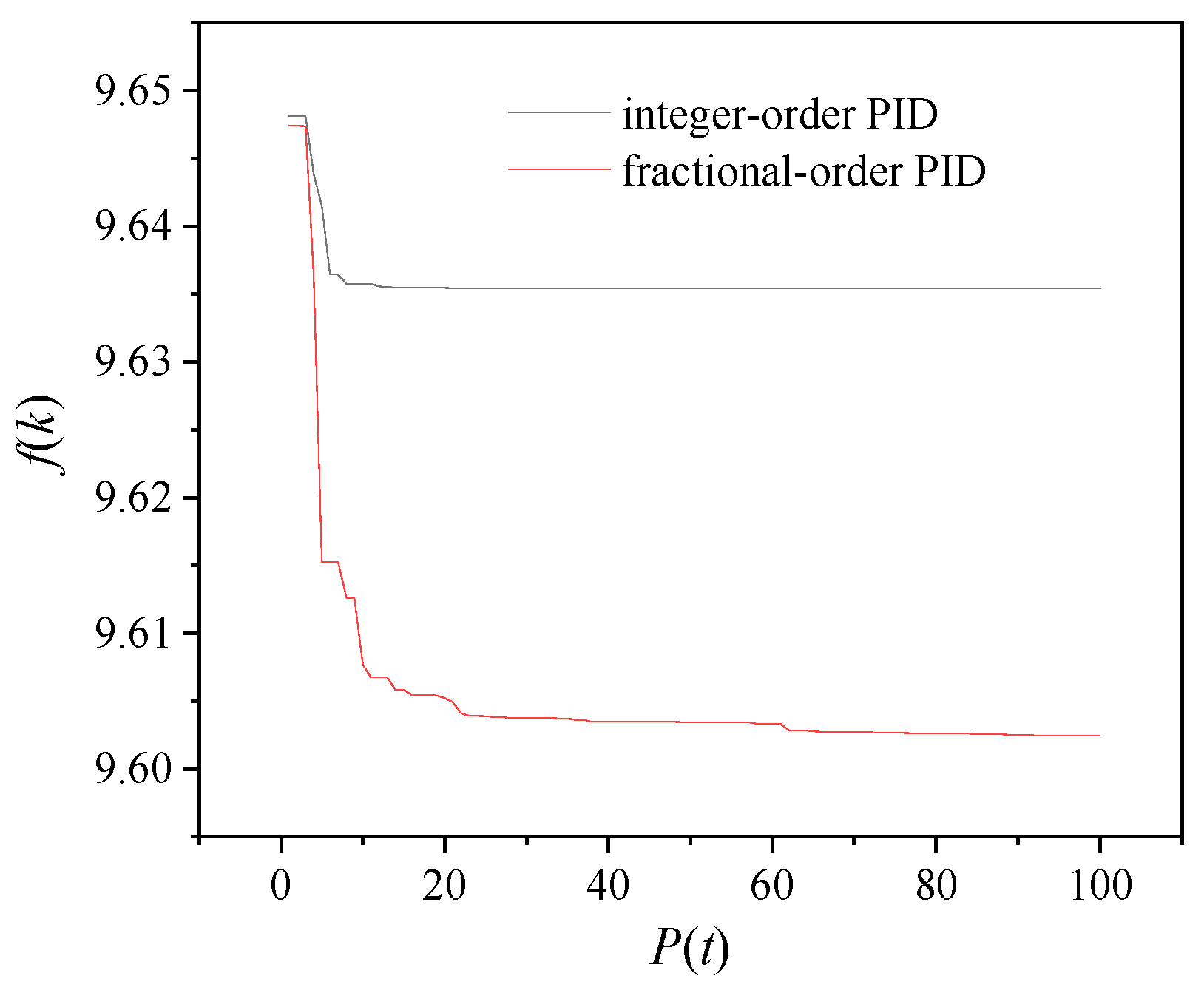
4.1. Variations in Fitness Function
4.2. Vibration Characteristics under C-Class Road
4.2.1. Changes in Control Signals
4.2.2. Variations in Performance Indicators in the Time Domain
4.2.3. Variations in Performance Indicators in the Frequency Domain
4.3. Root Mean Square Value on All Road Surfaces
5. Comparison and Discussion
5.1. Comparison with the Existing Literature
5.2. Promotion of Suspension Smoothness by Other Technologies
- Optimized suspension structure [120]: The suspension structure directly affects the smoothness and comfort of the vehicle. In terms of suspension structure, the adoption of independent suspension structure, air suspension structure, magnetorheological suspension, and electronic control suspension is an important means to improve automobile smoothness [121]. Through these means, it can better adapt to the requirements of different road surfaces and improve the smoothness and comfort of the automobile. The suspension structure of an automobile is part of the overall design of the vehicle and is closely related to the vehicle’s power system and body structure. Therefore, when optimizing the suspension structure, the overall design of the vehicle should be considered, including factors such as the weight distribution of the vehicle, the layout of the wheels, and the stiffness of the vehicle body, in order to better adapt the suspension structure to the vehicle’s operating environment and performance requirements, and improve the driving stability and riding comfort of the vehicle [122].
- Optimized control algorithm [123]: To improve the smoothness of the vehicle, the control algorithm needs to take into account the vehicle’s powertrain and suspension system and achieve the precise control of the vehicle’s driving state through real-time monitoring and intelligent adjustment [124]. At the same time, advanced sensor technology, artificial intelligence algorithms, and vehicle dynamic models and simulation technology need to be introduced to achieve intelligent monitoring and adjustment of vehicle driving status. In the future, electronic control suspension systems will increasingly adopt intelligent adjustment algorithms based on artificial intelligence, deep learning, and other technologies. By analyzing and learning from big data, it enables more precise and personalized suspension adjustment, bringing a better driving experience to drivers and passengers [125].
- Intelligent driving assistance system [126]: Avoiding driving on uneven roads is an important measure to avoid vehicle vibration. The road condition monitoring system based on big data collects and analyzes road condition data and traffic flow data to monitor the smoothness of the road surface and traffic conditions in real time [127]. It can remind vehicle owners to avoid uneven and congested roads, thus avoiding vehicle vibration. The driving behavior monitoring system based on artificial intelligence monitors the smoothness and safety of driving behavior by collecting and analyzing driving data and vehicle-status data. It reminds drivers to pay attention to driving behavior and avoid excessive speed, sharp turning, and other behaviors that cause the vehicle to vibrate [128].
6. Conclusions
- The use of a genetic algorithm to rectify the structural parameters of the fractional-order PIλDμ controller avoids the influence of subjective factors in the empirical trial-and-error method, improves the work efficiency, and makes the structural parameters of the fractional-order PIλDμ controller more reliable. The fractional-order PIλDμ controller uses the vertical speed of the body as a feedback variable, and the driver’s comfort has been improved and the suspension work performance has been enhanced under fractional-order PIλDμ control.
- In comparison to passive suspension, the optimized fractional-order PID control suspension achieves a 25% improvement in the average optimization of the root mean square (RMS) of acceleration under random road conditions, a 30% improvement in the average optimization of suspension dynamic deflection, and a 5% improvement in the average optimization of tire dynamic displacement. However, when compared to the integer-order PID control suspension, the average optimization of the root mean square (RMS) of acceleration under random road conditions decreases by 5%, while the average optimization of suspension dynamic deflection and tire dynamic displacement increases by 3% and 2%, respectively.
- The amplitude–frequency characteristic curves of the vibration response of the active and passive suspensions are plotted. The active suspension designed by the fractional-order PIλDμ method improves the acceleration of the suspension under low-frequency perturbations accordingly, and significantly reduces the value of the resonance peaks at low frequencies, which increases the smoothness of the vehicle during driving. The dynamic displacement of the vehicle tires is also reduced at low-frequency disturbances but increases the deformation at the high-frequency resonance peaks. The dynamic deflection of the suspension controlled by the fractional-order PIλDμ increases at low-frequency perturbations compared to the passive suspension.
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sun, W.C.; Zhao, Z.L.; Gao, H.J. Saturated Adaptive Robust Control for Active Suspension Systems. IEEE Trans. Ind. Electron. 2013, 60, 3889–3896. [Google Scholar] [CrossRef]
- Pan, H.H.; Sun, W.C. Nonlinear Output Feedback Finite-Time Control for Vehicle Active Suspension Systems. IEEE Trans. Ind. Inform. 2019, 15, 2073–2082. [Google Scholar] [CrossRef]
- Sun, W.C.; Gao, H.J.; Kaynak, O. Adaptive Backstepping Control for Active Suspension Systems With Hard Constraints. IEEE/ASME Trans. Mechatron. 2013, 18, 1072–1079. [Google Scholar] [CrossRef]
- Sun, W.C.; Gao, H.J.; Kaynak, O. Vibration Isolation for Active Suspensions With Performance Constraints and Actuator Saturation. IEEE/ASME Trans. Mechatron. 2015, 20, 675–683. [Google Scholar] [CrossRef]
- Li, H.Y.; Yu, J.Y.; Hilton, C.; Liu, H.H. Adaptive Sliding-Mode Control for Nonlinear Active Suspension Vehicle Systems Using T-S Fuzzy Approach. IEEE Trans. Ind. Electron. 2013, 60, 3328–3338. [Google Scholar] [CrossRef]
- Wen, S.P.; Chen, M.Z.Q.; Zeng, Z.G.; Yu, X.H.; Huang, T.W. Fuzzy Control for Uncertain Vehicle Active Suspension Systems via Dynamic Sliding-Mode Approach. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 24–32. [Google Scholar] [CrossRef]
- Li, H.Y.; Zhang, Z.X.; Yan, H.C.; Xie, X.P. Adaptive Event-Triggered Fuzzy Control for Uncertain Active Suspension Systems. IEEE Trans. Cybern. 2019, 49, 4388–4397. [Google Scholar] [CrossRef] [PubMed]
- Li, H.Y.; Jing, X.J.; Karimi, H.R. Output-Feedback-Based H∞ Control for Vehicle Suspension Systems With Control Delay. IEEE Trans. Ind. Electron. 2014, 61, 436–446. [Google Scholar] [CrossRef]
- Huang, D.S.; Zhang, J.Q.; Liu, Y.L. The PID Semi-Active Vibration Control on Nonlinear Suspension System with Time Delay. Int. J. Intell. Transp. 2018, 16, 125–137. [Google Scholar] [CrossRef]
- Yi, K.; Song, B.S. A new adaptive sky-hook control of vehicle semi-active suspensions. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 1999, 213, 293–303. [Google Scholar] [CrossRef]
- Fateh, M.M. Robust impedance control of a hydraulic suspension system. Int. J. Robust. Nonlin. Control 2010, 20, 858–872. [Google Scholar] [CrossRef]
- Dou, G.W.; Yu, W.H.; Li, Z.X.; Khajepour, A.; Tan, S.Q. Sliding Mode Control of Laterally Interconnected Air Suspensions. Appl. Sci. 2020, 10, 4320. [Google Scholar] [CrossRef]
- Liu, C.C.; Ren, C.B.; Yue, S.C.; Li, L.J.; Liu, L. Optimal Control for Cubic Strongly Nonlinear Vibration of Automobile Suspension. J. Low Freq. Noise Vib. Act. Control 2014, 33, 233–243. [Google Scholar] [CrossRef]
- Koch, G.; Kloiber, T. Driving State Adaptive Control of an Active Vehicle Suspension System. IEEE Trans. Control Syst. Technol. 2014, 22, 44–57. [Google Scholar] [CrossRef]
- Sharkawy, A.B. Fuzzy and adaptive fuzzy control for the automobiles’ active suspension system. Veh. Syst. Dyn. 2005, 43, 795–806. [Google Scholar] [CrossRef]
- Eski, I.; Yidirim, S. Vibration control of vehicle active suspension system using a new robust neural network control system. Simul. Model. Pract. Theory 2009, 17, 778–793. [Google Scholar] [CrossRef]
- Xiao, H.S.; Chen, W.W.; Zhou, H.H.; Zu, J.W. Integrated control of active suspension system and electronic stability programme using hierarchical control strategy: Theory and experiment. Veh. Syst. Dyn. 2011, 49, 381–397. [Google Scholar] [CrossRef]
- Feng, J.Z.; Li, J.; Yu, F. Ga-based PID and fuzzy logic control for active vehicle suspension system. Int. J. Automot. Technol. 2003, 4, 181–191. [Google Scholar]
- Caponetto, R.; Diamante, O.; Fargione, G.; Risitano, A.; Tringali, D. A soft computing approach to fuzzy sky-hook control of semiactive suspension. IEEE Trans. Control Syst. Technol. 2003, 11, 786–798. [Google Scholar] [CrossRef]
- Zribi, M.; Karkoub, M. Robust control of a car suspension system using magnetorheological dampers. J. Vib. Control 2004, 10, 507–524. [Google Scholar] [CrossRef]
- Aljarbouh, A.; Fayaz, M.; Qureshi, M.S.; Boujoudar, Y. Hybrid Sliding Mode Control of Full-Car Semi-Active Suspension Systems. Symmetry 2021, 13, 2442. [Google Scholar] [CrossRef]
- Marzbanrad, J.; Ahmadi, G.; Hojjat, Y.; Zohoor, H. Optimal active control of vehicle suspension system including time delay and preview for rough roads. J. Vib. Control 2002, 8, 967–991. [Google Scholar] [CrossRef]
- Chantranuwathana, S.; Peng, H. Adaptive robust force control for vehicle active suspensions. Int. J. Adapt. Control Signal Process. 2004, 18, 83–102. [Google Scholar] [CrossRef]
- Kurczyk, S.; Pawelczyk, M. Fuzzy Control for Semi-Active Vehicle Suspension. J. Low Freq. Noise Vib. Act. Control 2013, 32, 217–225. [Google Scholar] [CrossRef]
- Ding, Z.S.; Zhao, F.; Qin, Y.C.; Tan, C. Adaptive neural network control for semi-active vehicle suspensions. J. Vibroeng. 2017, 19, 2654–2669. [Google Scholar] [CrossRef]
- Wang, S.; Shi, G.B.; Lin, Y. Integrated hierarchical control strategy of active suspension and differential assisted steering system for electric-wheel vehicle. Int. J. Veh. Des. 2019, 81, 212–240. [Google Scholar] [CrossRef]
- Yin, S.; Huang, Z.H. Performance Monitoring for Vehicle Suspension System via Fuzzy Positivistic C-Means Clustering Based on Accelerometer Measurements. IEEE/ASME Trans. Mechatron. 2015, 20, 2613–2620. [Google Scholar] [CrossRef]
- Basargan, H.; Mihály, A.; Gáspár, P.; Sename, O. An LPV-Based Online Reconfigurable Adaptive Semi-Active Suspension Control with MR Damper. Energies 2022, 15, 3648. [Google Scholar] [CrossRef]
- Gad, S.; Metered, H.; Bassuiny, A.; Ghany, A.M.A. Multi-objective genetic algorithm fractional-order PID controller for semi-active magnetorheologically damped seat suspension. J. Vib. Control 2017, 23, 1248–1266. [Google Scholar] [CrossRef]
- Rajendran, I.; Vijayarangan, S. Simulated annealing approach to the optimal design of automotive suspension systems. Int. J. Veh. Des. 2007, 43, 11–30. [Google Scholar] [CrossRef]
- Wang, F.C.; Wang, D.C.; Sun, J.; Zhao, J.Z. Intelligent optimal control for the crawler vehicle with semi-active suspension using modified staged continuous tabu search algorithm. Trans. Inst. Meas. Control 2018, 40, 3617–3624. [Google Scholar] [CrossRef]
- Alfi, A.; Fateh, M.M. Identification of nonlinear systems using modified particle swarm optimisation: A hydraulic suspension system. Veh. Syst. Dyn. 2011, 49, 871–887. [Google Scholar] [CrossRef]
- Manna, S.; Mani, G.; Ghildiyal, S.; Stonier, A.A.; Peter, G.; Ganji, V.; Murugesan, S. Ant Colony Optimization Tuned Closed-Loop Optimal Control Intended for Vehicle Active Suspension System. IEEE Access 2022, 10, 53735–53745. [Google Scholar] [CrossRef]
- Jiang, Y.; Wang, R.C.; Ding, R.K.; Sun, D.; Liu, W. Design and test study of a new mixed control method for magnetorheological semi-active suspension based on electromechanical analogy theory. J. Theor. App. Mech. 2021, 59, 189–201. [Google Scholar] [CrossRef]
- Zhao, H.; Wang, G.; Lv, W.; Cao, Y.; Li, X. Optimization of hydropneumatic suspension for articulated wheel loader based on kriging model and particle swarm algorithm. Adv. Mech. Eng. 2018, 10, 1–10. [Google Scholar] [CrossRef]
- Peng, D.Z.; Tan, G.F.; Fang, K.K.; Chen, L.; Agyeman, P.-K.; Zhang, Y.-X. Multiobjective Optimization of an Off-Road Vehicle Suspension Parameter through a Genetic Algorithm Based on the Particle Swarm Optimization. Math. Probl. Eng. 2021, 2021, 9640928. [Google Scholar] [CrossRef]
- Wu, L.P.; Zhou, R.; Bao, J.S.; Yang, G.; Sun, F.; Xu, F.C.; Jin, J.J.; Zhang, Q.; Jiang, W.K.; Zhang, X.Y. Vehicle Stability Analysis under Extreme Operating Conditions Based on LQR Control. Sensors 2022, 22, 9791. [Google Scholar] [CrossRef]
- Nagarkar, M.P.; Bhalerao, Y.J.; Patil, G.J.V.; Patil, R.N.Z. GA-based multi-objective optimization of active nonlinear quarter car suspension systemPID and fuzzy logic control. Int. J. Mech. Mater. Eng. 2018, 13, 10. [Google Scholar] [CrossRef]
- Chen, X.; Zhou, Y. Modelling and Analysis of Automobile Vibration System Based on Fuzzy Theory under Different Road Excitation Information. Complexity 2018, 2018, 2381568. [Google Scholar] [CrossRef]
- Ji, G.; Zhang, L.; Shan, M.; Zhang, J. Enhanced variable universe fuzzy PID control of the active suspension based on expansion factor parameters adaption and genetic algorithm. Eng. Res. Express 2023, 5, 035007. [Google Scholar] [CrossRef]
- Chiou, J.S.; Tsai, S.H.; Liu, M.T. A PSO-based adaptive fuzzy PID-controllers. Simul. Model. Pract. Theory 2012, 26, 49–59. [Google Scholar] [CrossRef]
- Wang, J.; Lv, K.; Wang, H.; Guo, S.; Wang, J. Research on nonlinear model and fuzzy fractional order PIλDμ control of air suspension system. J. Low Freq. Noise Vib. Act. Control 2022, 41, 712–731. [Google Scholar] [CrossRef]
- Bashir, A.O.; Rui, X.T.; Zhang, J.S. Ride Comfort Improvement of a Semi-active Vehicle Suspension Based on Hybrid Fuzzy and Fuzzy-PID Controller. Stud. Inform. Control 2019, 28, 421–430. [Google Scholar] [CrossRef]
- Yin, Z.; Su, R.; Ma, X. Dynamic Responses of 8-DoF Vehicle with Active Suspension: Fuzzy-PID Control. World Electr. Veh. J. 2023, 14, 249. [Google Scholar] [CrossRef]
- Liu, H.; Pan, Y.P.; Li, S.G.; Chen, Y. Adaptive Fuzzy Backstepping Control of Fractional-Order Nonlinear Systems. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 2209–2217. [Google Scholar] [CrossRef]
- Mathiyalagan, K.; Sangeetha, G. Second-order sliding mode control for nonlinear fractional-order systems. Appl. Math. Comput. 2020, 383, 125264. [Google Scholar] [CrossRef]
- Duarte-Mermoud, M.A.; Aguila-Camacho, N.; Gallegos, J.A.; Castro-Linares, R. Using general quadratic Lyapunov functions to prove Lyapunov uniform stability for fractional order systems. Commun. Nonlinear Sci. Numer. Simul. 2015, 22, 650–659. [Google Scholar] [CrossRef]
- Sun, G.H.; Wu, L.G.; Kuang, Z.; Ma, Z.Q.; Liu, J.X. Practical tracking control of linear motor via fractional-order sliding mode. Automatica 2018, 94, 221–235. [Google Scholar] [CrossRef]
- Bao, H.B.; Park, J.H.; Cao, J.D. Adaptive synchronization of fractional-order memristor-based neural networks with time delay. Nonlinear Dyn. 2015, 82, 1343–1354. [Google Scholar] [CrossRef]
- Dabiri, A.; Moghaddam, B.P.; Machado, J.A.T. Optimal variable-order fractional PID controllers for dynamical systems. J. Comput. Appl. Math. 2018, 339, 40–48. [Google Scholar] [CrossRef]
- Wang, Y.Y.; Gu, L.Y.; Xu, Y.H.; Cao, X.X. Practical Tracking Control of Robot Manipulators With Continuous Fractional-Order Nonsingular Terminal Sliding Mode. IEEE Trans. Ind. Electron. 2016, 63, 6194–6204. [Google Scholar] [CrossRef]
- Muresan, C.I.; Birs, I.; Ionescu, C.; Dulf, E.H.; De Keyser, R. A Review of Recent Developments in Autotuning Methods for Fractional-Order Controllers. Fractal Fract. 2022, 6, 37. [Google Scholar] [CrossRef]
- Zeng, G.Q.; Chen, J.; Dai, Y.X.; Li, L.M.; Zheng, C.W.; Chen, M.R. Design of fractional order PID controller for automatic regulator voltage system based on multi-objective extremal optimization. Neurocomputing 2015, 160, 173–184. [Google Scholar] [CrossRef]
- Daraz, A.; Malik, S.A.; Basit, A.; Aslam, S.; Zhang, G.Q. Modified FOPID Controller for Frequency Regulation of a Hybrid Interconnected System of Conventional and Renewable Energy. Fractal Fract. 2023, 7, 89. [Google Scholar] [CrossRef]
- Tavakoli-Kakhki, M.; Haeri, M.; Tavazoei, M.S. Study on Control Input Energy Efficiency of Fractional Order Control Systems. IEEE J. Emerg. Sel. Top. Circuits Syst. 2013, 3, 475–482. [Google Scholar] [CrossRef]
- Tavazoei, M.S. Time response analysis of fractional-order control systems: A survey on recent results. Fract. Calc. Appl. Anal. 2014, 17, 440–461. [Google Scholar] [CrossRef]
- Li, R.X.; Wu, F.; Hou, P.Z.; Zou, H.B. Performance Assessment of FO-PID Temperature Control System Using a Fractional Order LQG Benchmark. IEEE Access 2020, 8, 116653–116662. [Google Scholar] [CrossRef]
- Xie, L.L.; Wan, D.; Qin, R. Dual-Loop Voltage-Current Control of a Fractional-Order Buck-Boost Converter Using a Fractional-Order PIλ Controller. Fractal Fract. 2023, 7, 256. [Google Scholar] [CrossRef]
- Malek, H.; Chen, Y.Q. Fractional Order Extremum Seeking Control: Performance and Stability Analysis. IEEE/ASME Trans. Mechatron. 2016, 21, 1620–1628. [Google Scholar] [CrossRef]
- Xiao, M.; Zheng, W.X.; Jiang, G.P.; Cao, J.D. Stability and Bifurcation of Delayed Fractional-Order Dual Congestion Control Algorithms. IEEE Trans. Autom. Control 2017, 62, 4819–4826. [Google Scholar] [CrossRef]
- Sadati, S.H.; Malekzadeh, S.; Ghasemi, M. Optimal control of an 8-DOF vehicle active suspension system using Kalman observer. Shock Vib. 2008, 15, 493–503. [Google Scholar] [CrossRef]
- Li, J.; Zhang, Z.W.; Gao, X.; Wang, P.D.; Li, J.T. Relation between power spectral density of road roughness and international roughness index and its application. Int. J. Veh. Des. 2018, 77, 247–271. [Google Scholar] [CrossRef]
- Múcka, P. Simulated Road Profiles According to ISO 8608 in Vibration Analysis. J. Test. Eval. 2018, 46, 405–418. [Google Scholar] [CrossRef]
- Múcka, P.; Stein, G.J.; Tobolka, P. Whole-body vibration and vertical road profile displacement power spectral density. Veh. Syst. Dyn. 2020, 58, 630–656. [Google Scholar] [CrossRef]
- Wang, X.L.; Cheng, Z.; Ma, N.L. Road Recognition Based on Vehicle Vibration Signal and Comfortable Speed Strategy Formulation Using ISA Algorithm. Sensors 2022, 22, 6682. [Google Scholar] [CrossRef]
- Jin, Y.F.; Luo, X. Stochastic optimal active control of a half-car nonlinear suspension under random road excitation. Nonlinear Dyn. 2013, 72, 185–195. [Google Scholar] [CrossRef]
- Zhao, H.; Lu, S. Vehicle’s time domain model with road input on four wheels. Qiche Gongcheng Automot. Eng. 1999, 21, 112–117. [Google Scholar]
- Wang, H.; Zhang, Z.; Zhang, B. Spatial Domain Reconstruction of Road Roughness Based on White Noises Filtering. Beijing Ligong Daxue Xuebao Trans. Beijing Inst. Technol. 2021, 41, 48–52. [Google Scholar]
- Zhang, L.; Zhang, T. Study on general model of random inputs of the vehicle with four wheels correlated in time domain. Nongye Jixie Xuebao Trans. Chin. Soc. Agric. Mach. 2005, 12, 29–31. [Google Scholar]
- Rivero, M.; Rogosin, S.V.; Machado, J.A.T.; Trujillo, J.J. Stability of Fractional Order Systems. Math. Probl. Eng. 2013, 2013, 356215. [Google Scholar] [CrossRef]
- Abd-Elmonem, A.; Banerjee, R.; Ahmad, S.; Jamshed, W.; Nisar, K.S.; Eid, M.R.; Ibrahim, R.W.; El Din, S.M. A comprehensive review on fractional-order optimal control problem and its solution. Open Math. 2023, 21, 20230105. [Google Scholar] [CrossRef]
- Garrappa, R.; Kaslik, E.; Popolizio, M. Evaluation of Fractional Integrals and Derivatives of Elementary Functions: Overview and Tutorial. Mathematics 2019, 7, 407. [Google Scholar] [CrossRef]
- Brandibur, O.; Garrappa, R.; Kaslik, E. Stability of Systems of Fractional-Order Differential Equations with Caputo Derivatives. Mathematics 2021, 9, 914. [Google Scholar] [CrossRef]
- Shah, P.; Agashe, S. Review of fractional PID controller. Mechatronics 2016, 38, 29–41. [Google Scholar] [CrossRef]
- Tepljakov, A.; Petlenkov, E.; Belikov, J. FOMCON: Fractional-order modeling and control toolbox for MATLAB. In Proceedings of the 2011 MIXDES—18th International Conference “Mixed Design of Integrated Circuits & Systems”, Gliwice, Poland, 16–18 June 2011. [Google Scholar]
- Katoch, S.; Chauhan, S.S.; Kumar, V. A review on genetic algorithm: Past, present, and future. Multimed. Tools Appl. 2021, 80, 8091–8126. [Google Scholar] [CrossRef] [PubMed]
- Roberge, V.; Tarbouchi, M.; Labonté, G. Comparison of Parallel Genetic Algorithm and Particle Swarm Optimization for Real-Time UAV Path Planning. IEEE Trans. Ind. Inform. 2013, 9, 132–141. [Google Scholar] [CrossRef]
- Du, H.P.; Lam, J.; Sze, K.Y. Non-fragile output feedback H∞ vehicle suspension control using genetic algorithm. Eng. Appl. Artif. Intel. 2003, 16, 667–680. [Google Scholar] [CrossRef]
- Sharma, S.K.; Irwin, G.W. Fuzzy coding of genetic algorithms. IEEE Trans. Evol. Comput. 2003, 7, 344–355. [Google Scholar] [CrossRef]
- Wang, J.X.; Duan, L.Q.; Yang, Y.P. An improvement crossover operation method in genetic algorithm and spatial optimization of heliostat field. Energy 2018, 155, 15–28. [Google Scholar] [CrossRef]
- Zeng, Y.H.; Liu, S.J.; E, J.Q. Neuron PI control for semi-active suspension system of tracked vehicle. J. Cent. South Univ. 2011, 18, 444–450. [Google Scholar] [CrossRef]
- Dridi, I.; Hamza, A.; Ben Yahia, N. Control of an active suspension system based on long short-term memory (LSTM) learning. Adv. Mech. Eng. 2023, 15, 16878132231156789. [Google Scholar] [CrossRef]
- Gomonwattanapanich, O.; Pannucharoenwong, N.; Rattanadecho, P.; Echaroj, S.; Hemathulin, S. Vibration Control of Vehicle by Active Suspension with LQG Algorithm. Int. J. Automot. Mech. Eng. 2020, 17, 8011–8018. [Google Scholar] [CrossRef]
- Gong, M.D.; Chen, H.; Zhao, D.X.; Zhu, J.X.; Deng, Y.J.; Song, H. Active suspension control strategy of heavy rescue vehicle based on multi-sensor information fusion. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2023, 237, 1338–1352. [Google Scholar] [CrossRef]
- Chen, L.; Liu, C.N.; Liu, W.; Nie, J.M.; Shen, Y.J.; Chen, G.T. Network synthesis and parameter optimization for vehicle suspension with inerter. Adv. Mech. Eng. 2017, 9, 1687814016684704. [Google Scholar] [CrossRef]
- Wu, K.W.; Ren, C.B.; Nan, Y.; Li, L.; Yuan, S.P.; Shao, S.J.; Sun, Z.H. Experimental research on vehicle active suspension based on time-delay control. Int. J. Control 2023, 97, 1157–1173. [Google Scholar] [CrossRef]
- Yang, D.D.; Yang, X.; Shen, Y.J.; Liu, Y.L.; Bi, S.L.; Liu, X.F. Analysis of ride comfort and road friendliness of heavy vehicle inertial suspension based on the ground-hook control strategy. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2023. [Google Scholar] [CrossRef]
- Chen, H.; Gong, M.D.; Zhao, D.X.; Liu, W.B.; Jia, G.Y. Coordination Control of Multi-Axis Steering and Active Suspension System for High-Mobility Emergency Rescue Vehicles. Mathematics 2022, 10, 3562. [Google Scholar] [CrossRef]
- Zhang, Y.G.; Ren, C.A.B.; Ma, K.H.; Xu, Z.; Zhou, P.C.; Chen, Y.J. Effect of delayed resonator on the vibration reduction performance of vehicle active seat suspension. J. Low Freq. Noise Vib. Act. Control 2022, 41, 387–404. [Google Scholar] [CrossRef]
- Ning, D.H.; Sun, S.S.; Du, H.P.; Li, W.H.; Li, W.X. Control of a multiple-DOF vehicle seat suspension with roll and vertical vibration. J. Sound Vib. 2018, 435, 170–191. [Google Scholar] [CrossRef]
- Alfadhli, A.; Darling, J.; Hillis, A.J. An Active Seat Controller with Vehicle Suspension Feedforward and Feedback States: An Experimental Study. Appl. Sci. 2018, 8, 603. [Google Scholar] [CrossRef]
- Li, L.H.; Xu, L.; Cui, H.; Abdelkareem, M.A.A.; Liu, Z.H.; Chen, J.Y. Validation and Optimization of Suspension Design for Testing Platform Vehicle. Shock Vib. 2021, 2021, 7963517. [Google Scholar] [CrossRef]
- Bingül, Ö.; Yildiz, A. Fuzzy logic and proportional integral derivative based multi-objective optimization of active suspension system of a 4x4 in-wheel motor driven electrical vehicle. J. Vib. Control 2023, 29, 1366–1386. [Google Scholar] [CrossRef]
- Wei, W.; Yu, S.J.; Li, B.Z. Research on Magnetic Characteristics and Fuzzy PID Control of Electromagnetic Suspension. Actuators 2023, 12, 203. [Google Scholar] [CrossRef]
- Theunissen, J.; Sorniotti, A.; Gruber, P.; Fallah, S.; Ricco, M.; Kvasnica, M.; Dhaens, M. Regionless Explicit Model Predictive Control of Active Suspension Systems With Preview. IEEE Trans. Ind. Electron. 2020, 67, 4877–4888. [Google Scholar] [CrossRef]
- Chen, H.; Gong, M.D.; Zhao, D.X.; Zhu, J.X. Body attitude control strategy based on road level for heavy rescue vehicles. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2021, 235, 1351–1363. [Google Scholar] [CrossRef]
- Ning, D.H.; Sun, S.S.; Zhang, F.; Du, H.P.; Li, W.H.; Zhang, B.J. Disturbance observer based Takagi-Sugeno fuzzy control for an active seat suspension. Mech. Syst. Signal Process. 2017, 93, 515–530. [Google Scholar] [CrossRef]
- Xu, H.; Zhao, Y.Q.; Ye, C.; Lin, F. Integrated optimization for mechanical elastic wheel and suspension based on an improved artificial fish swarm algorithm. Adv. Eng. Softw. 2019, 137, 102722. [Google Scholar] [CrossRef]
- Kou, F.R.; Du, J.F.; Wang, Z.; Li, D.; Xu, J.A. Nonlinear Modeling and Coordinate Optimization of a Semi-Active Energy Regenerative Suspension with an Electro-Hydraulic Actuator. Algorithms 2018, 11, 12. [Google Scholar] [CrossRef]
- Li, Y.; Yang, X.F.; Shen, Y.J.; Liu, Y.L.; Wang, W. Optimal design and dynamic control of the HMDV inertial suspension based on the ground-hook positive real network. Adv. Eng. Softw. 2022, 171, 103171. [Google Scholar] [CrossRef]
- Chen, K.R.; He, S.L.; Xu, E.Y.; Zheng, W.G.; Tang, R.J. Ride Comfort Analysis and Multivariable Co-Optimization of the Commercial Vehicle Based on an Improved Nonlinear Model. IEEE Access 2020, 8, 2732–2749. [Google Scholar] [CrossRef]
- Shirahatt, A.; Prasad, P.S.S.; Panzade, P.; Kulkarni, M.M. Optimal design of passenger car suspension for ride and road holding. J. Braz. Soc. Mech. Sci. Eng. 2008, 30, 66–76. [Google Scholar] [CrossRef]
- Ahmad, E.; Iqbal, J.; Khan, M.A.; Liang, W.; Youn, I. Predictive Control Using Active Aerodynamic Surfaces to Improve Ride Quality of a Vehicle. Electronics 2020, 9, 1463. [Google Scholar] [CrossRef]
- Xu, S.P.; Nguyen, V.; Li, S.M.; Ni, D.K. Performance of the Machine Learning on Controlling the Pneumatic Suspension of Automobiles on the Rigid and Off- Road Surfaces. SAE Int. J. Passeng. Veh. Syst. 2022, 15, 169–182. [Google Scholar] [CrossRef]
- Anandan, A.; Kandavel, A. Investigation and performance comparison of ride comfort on the created human vehicle road integrated model adopting genetic algorithm optimized proportional integral derivative control technique. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2020, 234, 288–305. [Google Scholar] [CrossRef]
- Qiao, C.F.; Wen, H.J.; Liu, X.Y.; Wang, G.Y. Damping Control and Experiment on Active Hydro-Pneumatic Suspension of Sprayer Based on Genetic Algorithm Optimization. Front. Neurorobot. 2021, 15, 707390. [Google Scholar] [CrossRef] [PubMed]
- Nan, Y.H.; Shi, W.; Fang, P. Improvement of ride performance with an active suspension based on fuzzy logic control. J. Vibroeng. 2016, 18, 3941–3955. [Google Scholar] [CrossRef]
- Liu, W.; Wang, R.C.; Rakheja, S.; Ding, R.K.; Meng, X.P.; Sun, D. Vibration analysis and adaptive model predictive control of active suspension for vehicles equipped with non-pneumatic wheels. J. Vib. Control 2023. [Google Scholar] [CrossRef]
- Dong, X.M.; Yu, M.; Li, Z.S.; Liao, C.R.; Chen, W.M. Neural network compensation of semi-active control for magneto-rheological suspension with time delay uncertainty. Smart Mater. Struct. 2009, 18, 015014. [Google Scholar] [CrossRef]
- Ahn, D.V.; Kim, K.; Oh, J.; Seo, J.; Lee, J.W.; Park, Y.J. Optimal Control of Semi-Active Suspension for Agricultural Tractors Using Linear Quadratic Gaussian Control. Sensors 2023, 23, 6474. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.; Wang, C.X.; Xu, J.H.; Long, S.C.; Chai, F.S.; Li, W.B.; Song, X.X.; Wang, X.P.; Wan, Z.M. Membrane humidity control of proton exchange membrane fuel cell system using fractional-order PID strategy. Appl. Energy 2023, 343, 121182. [Google Scholar] [CrossRef]
- Wang, N.; Wang, J.M.; Li, Z.X.; Tang, X.F.; Hou, D.B. Fractional-Order PID Control Strategy on Hydraulic-Loading System of Typical Electromechanical Platform. Sensors 2018, 18, 3024. [Google Scholar] [CrossRef] [PubMed]
- Jamil, A.A.; Tu, W.F.; Ali, S.W.; Terriche, Y.; Guerrero, J.M. Fractional-Order PID Controllers for Temperature Control: A Review. Energies 2022, 15, 3800. [Google Scholar] [CrossRef]
- Xu, L.; Du, J.Q.; Song, B.Y.; Cao, M.Y. A combined backstepping and fractional-order PID controller to trajectory tracking of mobile robots. Syst. Sci. Control Eng. 2022, 10, 133–140. [Google Scholar] [CrossRef]
- Yang, B.; Yu, T.; Shu, H.C.; Zhu, D.N.; An, N.; Sang, Y.Y.; Jiang, L. Energy reshaping based passive fractional-order PID control design and implementation of a grid-connected PV inverter for MPPT using grouped grey wolf optimizer. Sol. Energy 2018, 170, 31–46. [Google Scholar] [CrossRef]
- Kavin, F.; Senthilkumar, R. Chaotic Whale Optimized Fractional Order PID Controller Design for Desalination Process. CMC Comput. Mater. Con. 2022, 71, 2789–2806. [Google Scholar] [CrossRef]
- Shan, W.J.; Wang, Y.F.; Tang, W. Fractional Order Internal Model PID Control for Pulp Batch Cooking Process. J. Chem. Eng. Jpn. 2023, 56, 2201288. [Google Scholar] [CrossRef]
- Copot, D.; Ghita, M.; Ionescu, C.M. Simple Alternatives to PID-Type Control for Processes with Variable Time-Delay. Processes 2019, 7, 146. [Google Scholar] [CrossRef]
- Begum, K.G. Coot bird optimization algorithm for the temperature control of continuous stirred tank reactor process. Asia-Pac. J. Chem. Eng. 2023, 18, e2787. [Google Scholar] [CrossRef]
- Fu, C.Z.; Lu, J.Y.; Ge, W.Q.; Tan, C.; Li, B. A Review of Electromagnetic Energy Regenerative Suspension System & Key Technologies. CMES Comput. Model. Eng. 2022, 135, 1779–1824. [Google Scholar]
- Du, H.P.; Liu, P.F.; Ning, D.H.; Zhang, N. Electrically Interconnected Suspension and Related Technologies: A Comprehensive Review. SAE Int. J. Veh. Dyn. Stab. 2023, 7, 387–403. [Google Scholar] [CrossRef]
- Abdelkareem, M.A.A.; Xu, L.; Ali, M.K.A.; Elagouz, A.; Mi, J.; Guo, S.J.; Liu, Y.L.; Zuo, L. Vibration energy harvesting in automotive suspension system: A detailed review. Appl. Energy 2018, 229, 672–699. [Google Scholar] [CrossRef]
- Ferhath, A.A.; Kasi, K. A Review on Various Control Strategies and Algorithms in Vehicle Suspension Systems. Int. J. Automot. Mech. Eng. 2023, 20, 10720–10735. [Google Scholar] [CrossRef]
- BalaMurugan, L.; Jancirani, J. An investigation on semi-active suspension damper and control strategies for vehicle ride comfort and road holding. Proc. Inst. Mech. Eng. Part I J. Syst. Control. Eng. 2012, 226, 1119–1129. [Google Scholar] [CrossRef]
- Ezeta, J.H.; Mandow, A.; Cerezo, A.G. Active and Semi-active Suspension Systems: A Review. Rev. Iberoam. Autom. Infrom. Ind. 2013, 10, 121–132. [Google Scholar] [CrossRef]
- Cao, J.T.; Liu, H.H.; Li, P.; Brown, D.J. State of the art in vehicle active suspension adaptive control systems based on intelligent methodologies. IEEE Trans. Intell. Transp. 2008, 9, 392–405. [Google Scholar]
- Mozaffari, A.; Chenouri, S.; Qin, Y.C.; Khajepour, A. Learning-based vehicle suspension controller design: A review of the state-of-the-art and future research potentials. eTransportation 2019, 2, 100024. [Google Scholar] [CrossRef]
- Zheng, X.Y.; Zhang, H.; Yan, H.C.; Yang, F.W.; Wang, Z.P.; Vlacic, L. Active Full-Vehicle Suspension Control via Cloud-Aided Adaptive Backstepping Approach. IEEE Trans. Cybern. 2020, 50, 3113–3124. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| rx | 0.57 m | ry | 0.33 m |
| l3 | 0.74 m | l4 | 0.74 m |
| l2 | 1.3 m | l1 | 1.5 m |
| cs4 | 1000 N∙s/m | cs3 | 1000 N∙s/m |
| cs2 | 1000 N∙s/m | cs1 | 1000 N∙s/m |
| ks4 | 22,000 N/m | ks3 | 22,000 N/m |
| ks2 | 17,000 N/m | ks1 | 17,000 N/m |
| ku4 | 200,000 N/m | ku3 | 200,000 N/m |
| ku2 | 200,000 N/m | ku1 | 200,000 N/m |
| mu4 | 45 kg | mu3 | 45 kg |
| mu2 | 40 kg | mu1 | 40 kg |
| kc | 100,000 N/m | cc | 2200 N∙s/m |
| Jθ | 2440 kg∙m2 | Jφ | 380 kg∙m2 |
| mc | 80 kg | mb | 1480 kg |
| Category | Gq(n0)/(10−6 m3) (n0 = 0.1 m−1) | σq/(10−3 m) (0.011 m−1 < n < 2.83 m−1) |
|---|---|---|
| A | 16 | 3.81 |
| B | 64 | 7.61 |
| C | 256 | 15.23 |
| D | 1024 | 30.45 |
| E | 4096 | 60.90 |
| F | 16,384 | 121.89 |
| G | 65,536 | 243.61 |
| H | 262,144 | 487.22 |
| PID | Integer-Order PID | Fractional-Order PID | ||||||
|---|---|---|---|---|---|---|---|---|
| kp | ki | kd | kp | ki | kd | λ | μ | |
| Value | 2249.54424 | 2722.04638 | 0.30244 | 1059.56885 | 2777.72145 | 5.05887 | 0.47772 | 0.44056 |
| PID | uc | u1 | u2 | u3 | u4 | |
|---|---|---|---|---|---|---|
| Integer-order | RMS | 129.32691 | 158.85456 | 121.82032 | 162.11136 | 166.07410 |
| AVE | 10.86735 | 11.196190 | 10.941795 | 11.377870 | 11.12347 | |
| Fractional-order | RMS | 126.30237 | 150.73555 | 118.37600 | 154.02911 | 161.77400 |
| AVE | 8.87194 | 8.99648 | 8.85489 | 8.80790 | 8.66631 | |
| AVB1 | AVB2 | AVB3 | AVB4 | SWS1 | SWS2 | SWS3 | SWS4 | DTD1 | DTD2 | DTD3 | DTD4 | ||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| A | P | 0.22954 | 0.20588 | 0.13553 | 0.22286 | 0.00401 | 0.00248 | 0.00412 | 0.00398 | 0.00146 | 0.00051 | 0.00152 | 0.0007 |
| I | 0.12615 | 0.14765 | 0.11226 | 0.20072 | 0.00332 | 0.00188 | 0.00308 | 0.00185 | 0.00148 | 0.00048 | 0.00150 | 0.00053 | |
| F | 0.14705 | 0.15132 | 0.11739 | 0.20684 | 0.00325 | 0.00180 | 0.00302 | 0.00180 | 0.00146 | 0.00047 | 0.00149 | 0.00054 | |
| B | P | 0.45907 | 0.41177 | 0.27106 | 0.44572 | 0.00803 | 0.00497 | 0.00824 | 0.00796 | 0.00293 | 0.00102 | 0.00304 | 0.00134 |
| I | 0.25229 | 0.29531 | 0.22452 | 0.40145 | 0.00665 | 0.00375 | 0.00617 | 0.00370 | 0.00297 | 0.00096 | 0.00301 | 0.00107 | |
| F | 0.29409 | 0.30263 | 0.23477 | 0.41368 | 0.00649 | 0.00361 | 0.00604 | 0.00360 | 0.00293 | 0.00095 | 0.00298 | 0.00107 | |
| C | P | 0.91814 | 0.82353 | 0.54211 | 0.89143 | 0.01605 | 0.00993 | 0.01647 | 0.01592 | 0.00586 | 0.00204 | 0.00608 | 0.00267 |
| I | 0.50459 | 0.59061 | 0.44904 | 0.80290 | 0.01329 | 0.00751 | 0.01233 | 0.00741 | 0.00593 | 0.00192 | 0.00601 | 0.00213 | |
| F | 0.58818 | 0.60526 | 0.46954 | 0.82735 | 0.01299 | 0.00721 | 0.01208 | 0.00719 | 0.00586 | 0.00190 | 0.00596 | 0.00215 | |
| D | P | 1.83628 | 1.64707 | 1.08423 | 1.78287 | 0.03211 | 0.01986 | 0.03295 | 0.03185 | 0.01171 | 0.00408 | 0.01217 | 0.00535 |
| I | 1.00918 | 1.18122 | 0.89808 | 1.60580 | 0.02659 | 0.01502 | 0.02466 | 0.01481 | 0.01187 | 0.00384 | 0.01203 | 0.00426 | |
| F | 1.17636 | 1.21052 | 0.93909 | 1.65471 | 0.02598 | 0.01443 | 0.02415 | 0.01439 | 0.01171 | 0.00379 | 0.01191 | 0.00430 | |
| E | P | 3.67257 | 3.29413 | 2.16846 | 3.56574 | 0.06421 | 0.03973 | 0.06589 | 0.06369 | 0.02343 | 0.00817 | 0.02433 | 0.01070 |
| I | 2.01836 | 2.36244 | 1.79615 | 3.21159 | 0.05317 | 0.03003 | 0.04932 | 0.02963 | 0.02373 | 0.00768 | 0.02405 | 0.00853 | |
| F | 2.35273 | 2.42104 | 1.87817 | 3.30941 | 0.05195 | 0.02886 | 0.04831 | 0.02877 | 0.02342 | 0.00759 | 0.02383 | 0.00860 | |
| F | P | 7.34513 | 6.58827 | 4.33691 | 7.13147 | 0.12843 | 0.07945 | 0.13178 | 0.12738 | 0.04685 | 0.01634 | 0.04867 | 0.02139 |
| I | 4.03671 | 4.72489 | 3.59231 | 6.42319 | 0.10634 | 0.06006 | 0.09864 | 0.05925 | 0.04747 | 0.01536 | 0.04811 | 0.01706 | |
| F | 4.70545 | 4.84208 | 3.75635 | 6.61883 | 0.10391 | 0.05771 | 0.09662 | 0.05755 | 0.04685 | 0.01518 | 0.04765 | 0.01720 | |
| G | P | 14.69026 | 13.17654 | 8.67382 | 14.26295 | 0.25686 | 0.15891 | 0.26357 | 0.25476 | 0.09370 | 0.03268 | 0.09733 | 0.04279 |
| I | 8.07343 | 9.44977 | 7.18461 | 12.84637 | 0.21268 | 0.12012 | 0.19728 | 0.11850 | 0.09494 | 0.03073 | 0.09622 | 0.03411 | |
| F | 9.41090 | 9.68417 | 7.51269 | 13.23766 | 0.20782 | 0.11543 | 0.19323 | 0.11510 | 0.09370 | 0.03036 | 0.09531 | 0.03440 | |
| H | P | 29.38052 | 26.35307 | 17.34764 | 28.52589 | 0.51372 | 0.31782 | 0.52713 | 0.50952 | 0.18741 | 0.06535 | 0.19466 | 0.08557 |
| I | 16.14685 | 18.89954 | 14.36922 | 25.69275 | 0.42537 | 0.24024 | 0.39457 | 0.23700 | 0.18987 | 0.06146 | 0.19244 | 0.06822 | |
| F | 18.82181 | 19.36833 | 15.02539 | 26.47531 | 0.41564 | 0.23085 | 0.38647 | 0.23019 | 0.18740 | 0.06072 | 0.19061 | 0.06880 | |
| Indicator | AVB1 | AVB2 | AVB3 | AVB4 | SWS1 | SWS2 | SWS3 | SWS4 | DTD1 | DTD2 | DTD3 | DTD4 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Optimization Ratio (%) | I/P | 45.042 | 28.283 | 17.169 | 9.931 | 17.197 | 24.408 | 25.148 | 53.485 | –1.314 | 5.958 | 1.141 | 20.273 |
| F/P | 35.937 | 26.504 | 13.386 | 7.188 | 19.091 | 27.363 | 26.685 | 54.822 | 0.004 | 7.089 | 2.080 | 19.601 | |
| F/I | –16.566 | –2.480 | –4.566 | –3.045 | 2.287 | 3.909 | 2.053 | 2.873 | 1.301 | 1.202 | 0.9505 | –0.843 | |
| Studies | Vehicle Type | Control Algorithm | Optimization Amplitude (%) | |||||
|---|---|---|---|---|---|---|---|---|
| AVB1(k) | AVB2(k) | AVB3(k) | AVB4(k) | SWSi(k) | DTDi(k) | |||
| Yin et al. [44] | electric vehicles | fuzzy PID | 21.17% | 22.00% | 21.37% | 24.17% | 15% | 10% |
| Zeng et al. [81] | tracked vehicles | neuron proportion integration | / | 38.6% | 45.2% | / | / | / |
| Dridi et al. [82] | active heavy trucks | intelligent neural network | / | 50% | / | / | / | / |
| Gomonwattanapanich et al. [83] | vehicles | linear quadratic Gaussian | / | 85.77% | 50.31% | 89.41% | / | / |
| Gong et al. [84] | heavy rescue vehicles | multi-sensor information fusion | / | 37.01% | 26.96% | 38.90% | / | / |
| Chen et al. [85] | vehicles | parameter sensitivity analysis | / | 18.9% | / | / | 1.47% | 0.3% |
| Wu et al. [86] | vehicles | time delay | / | 25.19% | / | / | / | 12.16% |
| Yang et al. [87] | heavy vehicles | ground-hook | / | 4.87% | / | / | 16.19% | 10.02% |
| Chen et al. [88] | emergency rescue vehicles | dual sliding mode | / | / | 16.89% | 29.08% | / | / |
| Zhang et al. [89] | vehicles | optimal time delay | 86% | 16% | 5% | / | / | / |
| Ning et al. [90] | heavy-duty vehicles | T-S fuzzy | 49.5% | / | / | / | / | / |
| Alfadhli et al. [91] | vehicles | feedforward and feedback | 25% | / | / | / | / | / |
| Li et al. [92] | vehicles | genetic algorithm | / | 16.66% | / | / | / | 39.71% |
| Bingül et al. [93] | electric vehicles | fuzzy logic | 57% | / | / | / | 60% | 0.1% |
| Wei et al. [94] | vehicles | fuzzy PID | / | 59.08% | 3.06% | 3.54% | 11.98% | 2.09% |
| Theunissen et al. [95] | vehicles | model predictive | / | 10% | 8% | 21% | / | / |
| Chen et al. [96] | heavy rescue vehicles | T-S fuzzy | / | 59.9% | 76.2% | 68.4% | / | / |
| Ning et al. [97] | heavy-duty vehicles | T-S fuzzy | 49.5% | / | / | / | / | / |
| Xu et al. [98] | vehicles | multi-objective optimization | / | 43.88% | / | / | 24.38% | 46.46% |
| Kou et al. [99] | vehicles | linear–quadratic Gaussian | / | 18.60% | / | / | / | 12.61% |
| Li et al. [100] | vehicles | model reference adaptive | / | 8.70% | / | / | 28.26% | 18.21% |
| Chen et al. [101] | vehicles | multi-variable co-optimization | 19.7% | / | / | / | 17.8% | / |
| Shirahatt et al. [102] | vehicles | genetic algorithm | 88.72% | / | / | / | / | 28.5% |
| Ahmad et al. [103] | vehicles | preview control | / | / | 16% | / | 20% | 1% |
| Xu et al. [104] | vehicles | fuzzy logic | / | 14.6% | 9.6% | 5.3% | / | / |
| Anandan et al. [105] | vehicles | PID | 21% | 35% | 33% | / | 18% | / |
| Qiao et al. [106] | self-propelled sprayers | fuzzy PID | / | 14.89% | / | / | / | / |
| Nan et al. [107] | vehicles | fuzzy logic | / | 36% | / | 35% | / | / |
| Liu et al. [108] | vehicles | adaptive control | / | 12.4% | / | / | / | 3.8% |
| Dong et al. [109] | vehicles | neural network | / | 24% | / | / | / | / |
| Ahn et al. [110] | tractors | linear–quadratic Gaussian | / | 47.06% | / | / | / | / |
| Present work | electric vehicles | fractional-order PIλDμ | 35.937% | 26.504% | 13.386% | 7.188% | 30% | 5% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yin, Z.; Wang, R.; Ma, X.; Su, R. Fractional-Order PIλDμ Control to Enhance the Driving Smoothness of Active Vehicle Suspension in Electric Vehicles. World Electr. Veh. J. 2024, 15, 184. https://0-doi-org.brum.beds.ac.uk/10.3390/wevj15050184
Yin Z, Wang R, Ma X, Su R. Fractional-Order PIλDμ Control to Enhance the Driving Smoothness of Active Vehicle Suspension in Electric Vehicles. World Electric Vehicle Journal. 2024; 15(5):184. https://0-doi-org.brum.beds.ac.uk/10.3390/wevj15050184
Chicago/Turabian StyleYin, Zongjun, Ru Wang, Xuegang Ma, and Rong Su. 2024. "Fractional-Order PIλDμ Control to Enhance the Driving Smoothness of Active Vehicle Suspension in Electric Vehicles" World Electric Vehicle Journal 15, no. 5: 184. https://0-doi-org.brum.beds.ac.uk/10.3390/wevj15050184