
A Comparative Study of Physically Accurate Synthetic Shadow Datasets in Agricultural Settings with Human Activity


Abstract
:1. Introduction
2. Materials and Methods
2.1. Synthetic vs. Traditional
2.2. Preparing the Virtual Scene
2.3. Lighting Setup
2.4. Render Optimization
2.5. Calculating the Shadow Mask
2.6. Procedural Generation
2.7. Evaluation Methods
3. Results
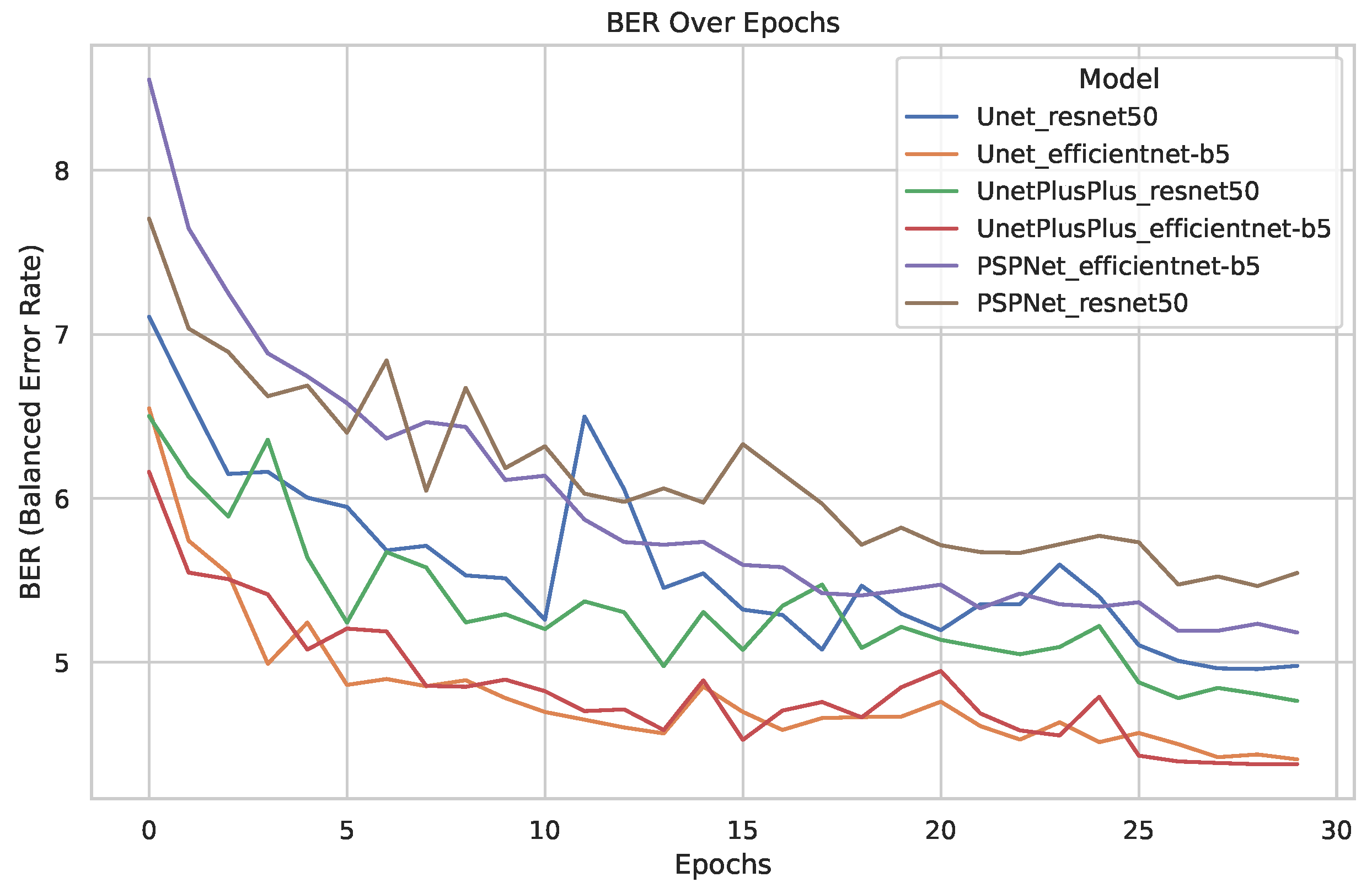
3.1. Baseline Model for AgroSegNet
3.2. Cross-Dataset Evaluation
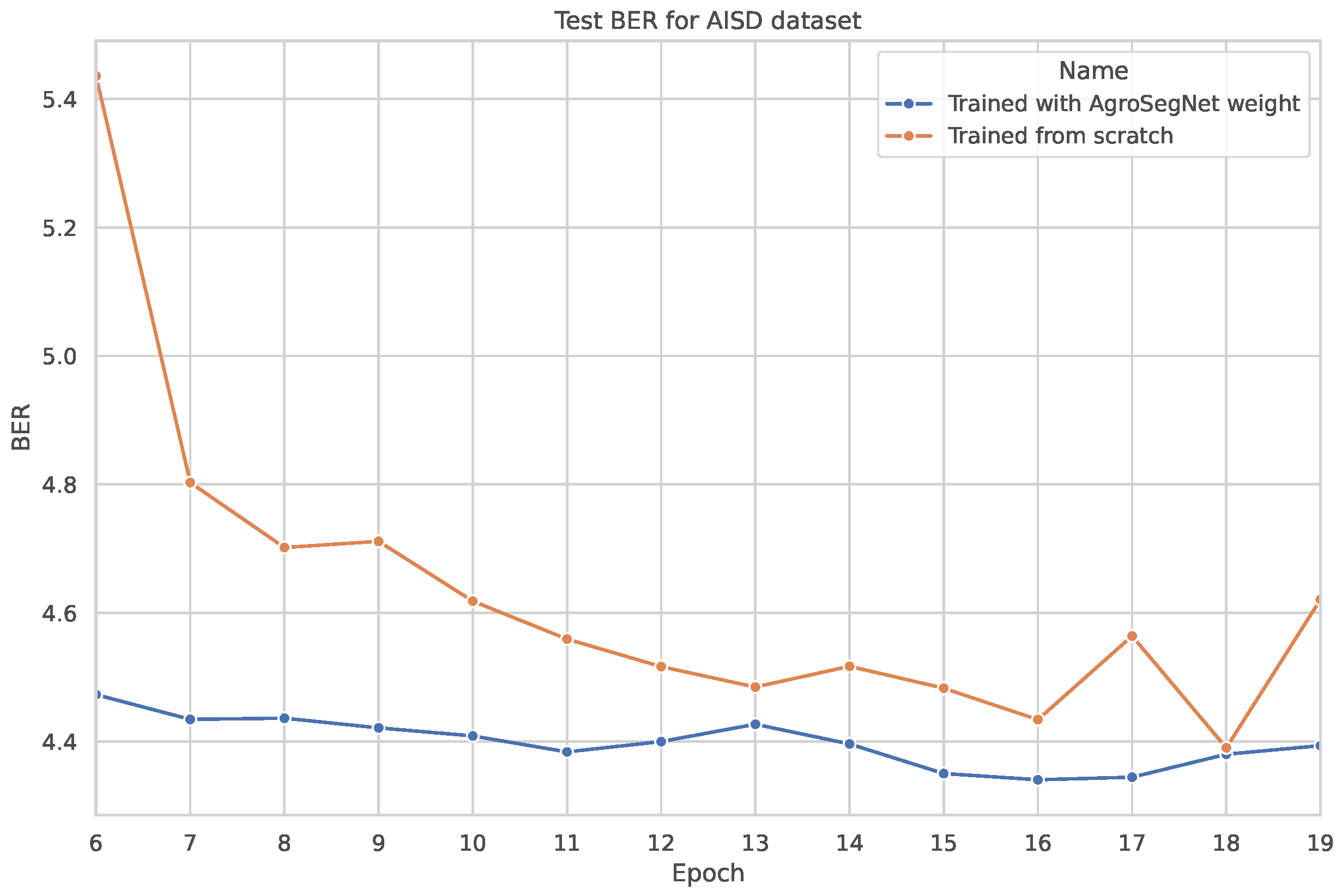
3.3. Transfer Learning
4. Discussion
4.1. Baseline Model for AgroSegNet
4.2. Cross-Dataset Evaluation
4.3. Transfer Learning
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Aminou Moussavou, A.A.; Raji, A.; Adonis, M. Impact study of partial shading phenomenon on solar PV module performance. In Proceedings of the 2018 International Conference on the Industrial and Commercial Use of Energy (ICUE), Cape Town, South Africa, 13–15 August 2018; pp. 1–7. [Google Scholar]
- Mhlanga, T.; Yalciner Ercoskun, O. Mapping, modeling and measuring photovoltaic potential in urban environments using google project sunroof. Gazi Univ. J. Sci. 2020, 8 Pt B, 593–606. [Google Scholar]
- Yang, X.; Zuo, X.; Xie, W.; Li, Y.; Guo, S.; Zhang, H. A Correction Method of NDVI Topographic Shadow Effect for Rugged Terrain. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 1–16. [Google Scholar] [CrossRef]
- Dupraz, C.; Marrou, H.; Talbot, G.; Dufour, L.; Nogier, A.; Ferard, Y. Combining solar photovoltaic panels and food crops for optimising land use: Towards new agrivoltaic schemes. Renew. Energy 2011, 36, 2725–2732. [Google Scholar] [CrossRef]
- Moreda, G.P.; Muñoz-García, M.A.; Alonso-García, M.C.; Hernández-Callejo, L. Techno-Economic Viability of Agro-Photovoltaic Irrigated Arable Lands in the EU-Med Region: A Case-Study in Southwestern Spain. Agronomy 2021, 11, 593. [Google Scholar] [CrossRef]
- Díaz-Pérez, J.C. Bell Pepper (Capsicum annum L.) Crop as Affected by Shade Level: Fruit Yield, Quality, and Postharvest Attributes, and Incidence of Phytophthora Blight (caused by Phytophthora capsici Leon.). Hortscience Horts 2014, 49, 891–900. [Google Scholar] [CrossRef]
- Vicente, T.F.Y.; Hou, L.; Yu, C.P.; Hoai, M.; Samaras, D. Large-scale Training of Shadow Detectors with Noisily-Annotated Shadow Examples. In Proceedings of the European Conference on Computer Vision (ECCV), Amsterdam, The Netherlands, 11–14 October 2016. [Google Scholar]
- Wang, J.; Li, X.; Yang, J. Stacked Conditional Generative Adversarial Networks for Jointly Learning Shadow Detection and Shadow Removal. In Proceedings of the CVPR, Salt Lake City, UT, USA, 18–23 June 2018. [Google Scholar]
- Hu, X.; Wang, T.; Fu, C.W.; Jiang, Y.; Wang, Q.; Heng, P.A. Revisiting Shadow Detection: A New Benchmark Dataset for Complex World. IEEE Trans. Image Process. 2021, 30, 1925–1934. [Google Scholar] [CrossRef] [PubMed]
- Luo, S.; Li, H.; Shen, H. Deeply supervised convolutional neural network for shadow detection based on a novel aerial shadow imagery dataset. ISPRS J. Photogramm. Remote Sens. 2020, 167, 443–457. [Google Scholar] [CrossRef]
- Sidorov, O. Conditional GANs for Multi-Illuminant Color Constancy: Revolution or Yet Another Approach? arXiv 2018, arXiv:1811.06604. Available online: http://arxiv.org/abs/1811.06604 (accessed on 15 January 2024).
- Tao, X.; Cao, J.; Hong, Y.; Niu, L. Shadow Generation with Decomposed Mask Prediction and Attentive Shadow Filling. arXiv 2024, arXiv:2306.17358. Available online: http://arxiv.org/abs/2306.17358 (accessed on 4 November 2023). [CrossRef]
- Inoue, N.; Yamasaki, T. Learning from Synthetic Shadows for Shadow Detection and Removal. IEEE Trans. Circuits Syst. Video Technol. 2021, 31, 4187–4197. [Google Scholar] [CrossRef]
- Hu, X.; Jiang, Y.; Fu, C.W.; Heng, P.A. Mask-ShadowGAN: Learning to Remove Shadows From Unpaired Data. In Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Republic of Korea, 27 October–2 November 2019; pp. 2472–2481. [Google Scholar] [CrossRef]
- Huang, M. AgroSegNet (Revision 495856b). 2024. Available online: https://huggingface.co/datasets/Menchen/AgroSegNet (accessed on 4 February 2024). [CrossRef]
- Blender Foundation. Blender. Version 3.6.4. Available online: https://www.blender.org/ (accessed on 19 October 2023).
- Simulating the Colors of the Sky. 2024. Available online: https://www.scratchapixel.com/lessons/procedural-generation-virtual-worlds/simulating-sky/simulating-colors-of-the-sky.html (accessed on 21 December 2023).
- Nishita, T.; Sirai, T.; Tadamura, K.; Nakamae, E. Display of The Earth Taking into Account Atmospheric Scattering. In Proceedings of the 20th Annual Conference on Computer Graphics and Interactive Techniques, Anaheim, CA, USA, 2–6 August 1993; Volume 27. [Google Scholar] [CrossRef]
- Nishita, T.; Dobashi, Y.; Kaneda, K.; Yamashita, H. Display method of the sky color taking into account multiple scattering. In Pacific Graphics; Department of Computer Science, National Tsing Hua University: HsinChu, Taiwan, 1996. [Google Scholar]
- ESRL Global Monitoring Laboratory-Global Radiation and Aerosols. 2024. Available online: https://gml.noaa.gov/grad/solcalc/ (accessed on 19 October 2023).
- Áfra, A.T. Intel® Open Image Denoise. 2024. Available online: https://www.openimagedenoise.org (accessed on 13 January 2024).
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Tan, M.; Le, Q.V. EfficientNet: Rethinking Model Scaling for Convolutional Neural Networks. arXiv 2019, arXiv:1905.11946. [Google Scholar]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Proceedings of the Medical Image Computing and Computer-Assisted Intervention—MICCAI 2015, Munich, Germany, 5–9 October 2015; Navab, N., Hornegger, J., Wells, W.M., Frangi, A.F., Eds.; Springer: Cham, Switzerland, 2015; pp. 234–241. [Google Scholar]
- Zhou, Z.; Rahman Siddiquee, M.M.; Tajbakhsh, N.; Liang, J. UNet++: A Nested U-Net Architecture for Medical Image Segmentation. In Proceedings of the Deep Learning in Medical Image Analysis and Multimodal Learning for Clinical Decision Support, Granada, Spain, 20 September 2018; Stoyanov, D., Taylor, Z., Carneiro, G., Syeda-Mahmood, T., Martel, A., Maier-Hein, L., Tavares, J.M.R., Bradley, A., Papa, J.P., Belagiannis, V., et al., Eds.; Springer: Berlin/Heidelberg, Germany, 2018; pp. 3–11. [Google Scholar]
- Zhao, H.; Shi, J.; Qi, X.; Wang, X.; Jia, J. Pyramid Scene Parsing Network. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 6230–6239. [Google Scholar] [CrossRef]
- Valanarasu, J.M.J.; Patel, V.M. Fine-Context Shadow Detection using Shadow Removal. In Proceedings of the 2023 IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), Waikoloa, HI, USA, 2–7 January 2023; pp. 1705–1714. [Google Scholar] [CrossRef]
- Jie, L.; Zhang, H. RMLANet: Random Multi-Level Attention Network for Shadow Detection. In Proceedings of the 2022 IEEE International Conference on Multimedia and Expo (ICME), Taipei, Taiwan, 18–22 July 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Zhu, L.; Xu, K.; Ke, Z.; Lau, R.W. Mitigating Intensity Bias in Shadow Detection via Feature Decomposition and Reweighting. In Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision (ICCV), Montreal, BC, Canada, 11–17 October 2021; pp. 4682–4691. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Encoder | Models | Dice Loss@30 | IoU@30 | F1@30 | BER@30 |
|---|---|---|---|---|---|
| ResNet50 | Unet | 0.051757 | 0.907921 | 0.948176 | 4.979060 |
| EfficientNet-b5 | 0.045990 | 0.917021 | 0.953940 | 4.408404 | |
| ResNet50 | Unet++ | 0.049745 | 0.911195 | 0.950185 | 4.764656 |
| EfficientNet-b5 | 0.045523 | 0.917817 | 0.954407 | 4.379995 | |
| ResNet50 | PSPNet | 0.460912 | 0.887085 | 0.935562 | 5.545524 |
| EfficientNet-b5 | 0.460150 | 0.893096 | 0.940081 | 5.181897 |
| Type | Dataset | Mean BER | Mean IoU |
|---|---|---|---|
| Model | AISD 22.565771 | 0.480851 | |
| AgroSegNet | 18.380684 | 0.521470 | |
| ISTD | 18.408633 | 0.579932 | |
| SBU | 16.299331 | 0.659962 | |
| Dataset | AISD | 19.929658 | 0.524968 |
| AgroSegNet | 22.304499 | 0.459299 | |
| ISTD | 12.655474 | 0.672963 | |
| SBU | 15.314512 | 0.584985 |
| Dataset | Method | BER@5 | IoU@5 | BER@20 | IoU@20 |
|---|---|---|---|---|---|
| SBU | with transfer learning | 5.367644 | 0.775531 | 5.257161 | 0.791660 |
| from scratch | 6.788574 | 0.781911 | 5.592205 | 0.794267 | |
| ISTD | with transfer learning | 4.929123 | 0.764420 | 3.792633 | 0.811411 |
| from scratch | 4.039957 | 0.828133 | 2.452189 | 0.890311 | |
| AISD | with transfer learning | 4.599337 | 0.779643 | 4.393424 | 0.804452 |
| from scratch | 22.304499 | 0.523356 | 4.620904 | 0.810667 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, M.; Fernandez-Beltran, R.; García-Mateos, G. A Comparative Study of Physically Accurate Synthetic Shadow Datasets in Agricultural Settings with Human Activity. Sensors 2024, 24, 2737. https://0-doi-org.brum.beds.ac.uk/10.3390/s24092737
Huang M, Fernandez-Beltran R, García-Mateos G. A Comparative Study of Physically Accurate Synthetic Shadow Datasets in Agricultural Settings with Human Activity. Sensors. 2024; 24(9):2737. https://0-doi-org.brum.beds.ac.uk/10.3390/s24092737
Chicago/Turabian StyleHuang, Mengchen, Ruben Fernandez-Beltran, and Ginés García-Mateos. 2024. "A Comparative Study of Physically Accurate Synthetic Shadow Datasets in Agricultural Settings with Human Activity" Sensors 24, no. 9: 2737. https://0-doi-org.brum.beds.ac.uk/10.3390/s24092737